VoxelGridDownsampleManager¶
Subscribing Topic¶
~input(sensor_msgs/PointCloud2)Original point cloud.
~add_grid(visualization_msgs/Marker)Additional marker used for xyz pass through filter before downsampling.
Only
frame_id,pose/positionandscalefield are used for filtering.Also, leaf size [m] in voxel grid downsampling will be defined by
color/rfield.Below marker is added internally by default.
header: frame_id: ~base_frame pose: position: x: 2.0 y: 0.0 z: -0.5 scale: x: 4.0 y: 2.0 z: 3.0 color: r: 0.05
Publishing Topic¶
~output(sensor_msgs/PointCloud2)Downsampled point cloud for debugging.
~output_encoded(jsk_recognition_msgs/SlicedPointCloud)Downsampled and sliced point cloud.
All sliced clusters will be published in order with the
slice_indexinfo.Number of the clusters is calculated from
~max_points.Messages of this topic can be decoded by
jsk_pcl_ros/VoxelGridDownsampleDecoder.
Parameter¶
~base_frame(String, default:pelvis)Frame ID of initial marker.
~max_points(Int, default:300)Number of maximum points in
~output_encoded.~rate(Float, default:1.0)Multiplicative inverse of duration between publishing
output_encoded.The unit is [Hz].
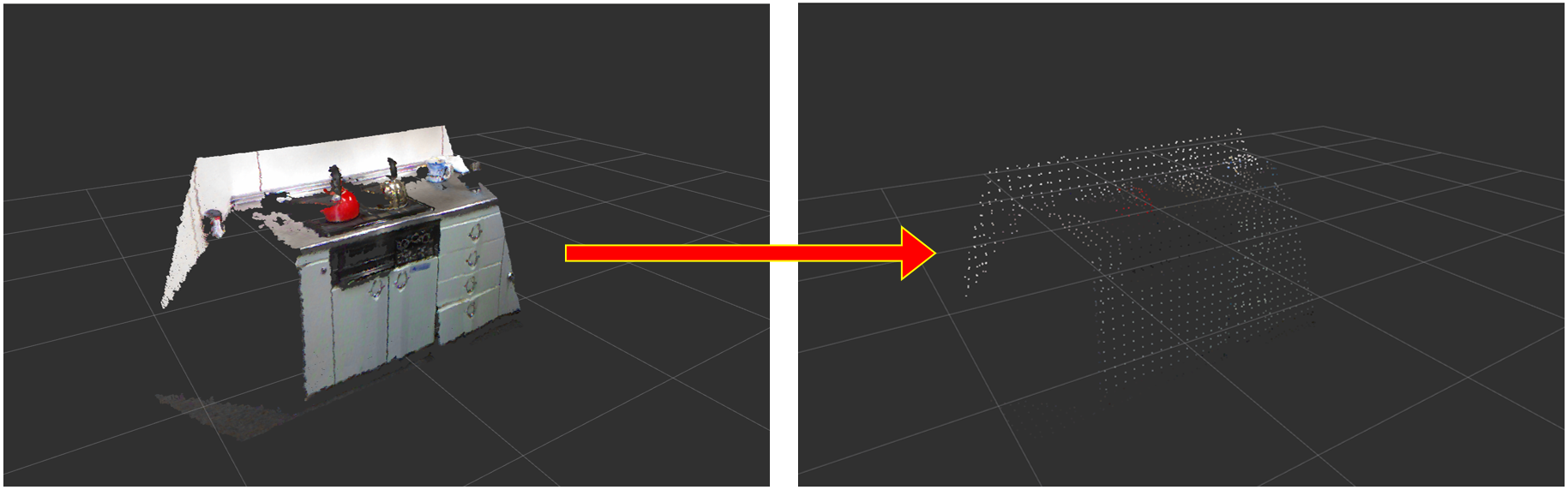
Sample¶
roslaunch jsk_pcl_ros sample_voxel_grid_downsample.launch