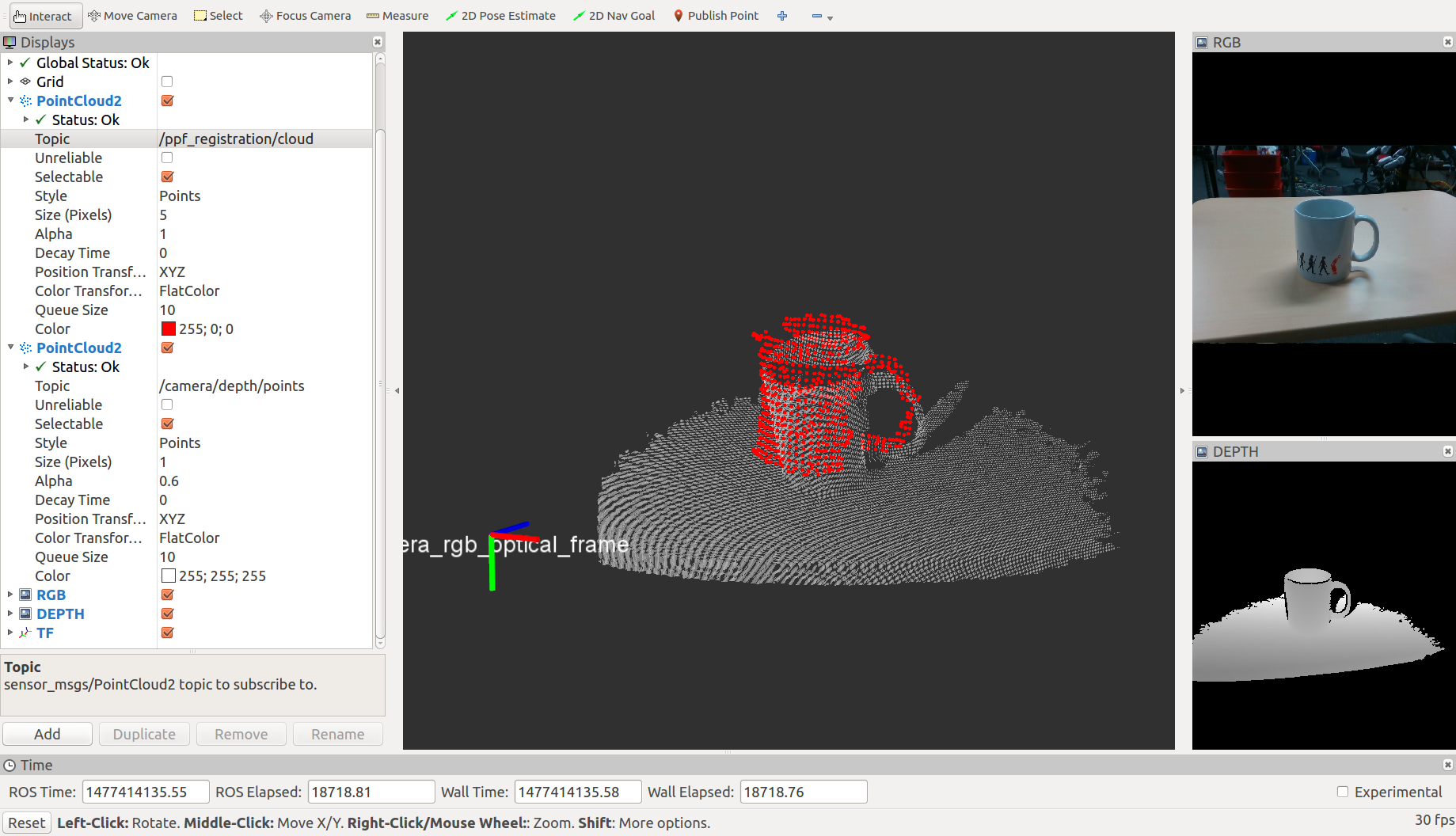
PPFRegistration¶
Subscribing Topics¶
~input/cloud(sensor_msgs/PointCloud2)Input point cloud. (
PointXYZ)~input/reference_cloud(sensor_msgs/PointCloud2)Reference point cloud. (
PointXYZ)Subscribe when parameter
use_arrayisfalse.~input/reference_array(jsk_recognition_msg/PointsArray)Reference point cloud array. (
PointXYZ)Subscribe when parameter
use_arrayistrue.
Publishing Topics¶
~output/cloud(sensor_msgs/PointCloud2)Output aligned reference point cloud.
Publish when parameter
use_arrayisfalse.~output/pose_stamped(geometry_msg/PoseStamped)Output aligned reference pose.
Publish when parameter
use_arrayisfalse.~output/points_array(jsk_recognition_msg/PointsArray)Output aligned reference point cloud array.
Publish when parameter
use_arrayistrue.~output/pose_array(geometry_msg/PoseArray)Output aligned reference pose array.
Publish when parameter
use_arrayistrue.
Parameters¶
~use_array(Boolean, default:false)Determine whether reference format is
jsk_recognition_msg/PointsArrayorsensor_msgs/PointCloud2~queue_size(Int, defalut: 100)Queue size
~approximate_sync(Boolean, defaultfalse)Select to use approximate sync policy
search_radius(Double, default 0.05)Search radius for normal calculation
sampling rate(Int, default 10)Sampling rate for registration
position_clustering_threshold(Double, default 0.2)Position clustering threshold for registration
rotation_clustering_threshold(Double, defalut 30)Rotation clustering threshold for registration
Sample¶
roslaunch jsk_pcl_ros sample_ppf_registration.launch