KeypointsPublisher¶
What Is This¶
This nodelet will calculate the NARF keypoints and publish.
Subscribing Topic¶
~input(sensor_msgs/PointCloud2)Input point cloud. Point type should be
pcl::PointXYZ.The point cloud should be organized.
Publishing Topic¶
~nerf_keypoints(sensor_msgs/PointCloud2)Point cloud of keypoints.
Parameters¶
None.
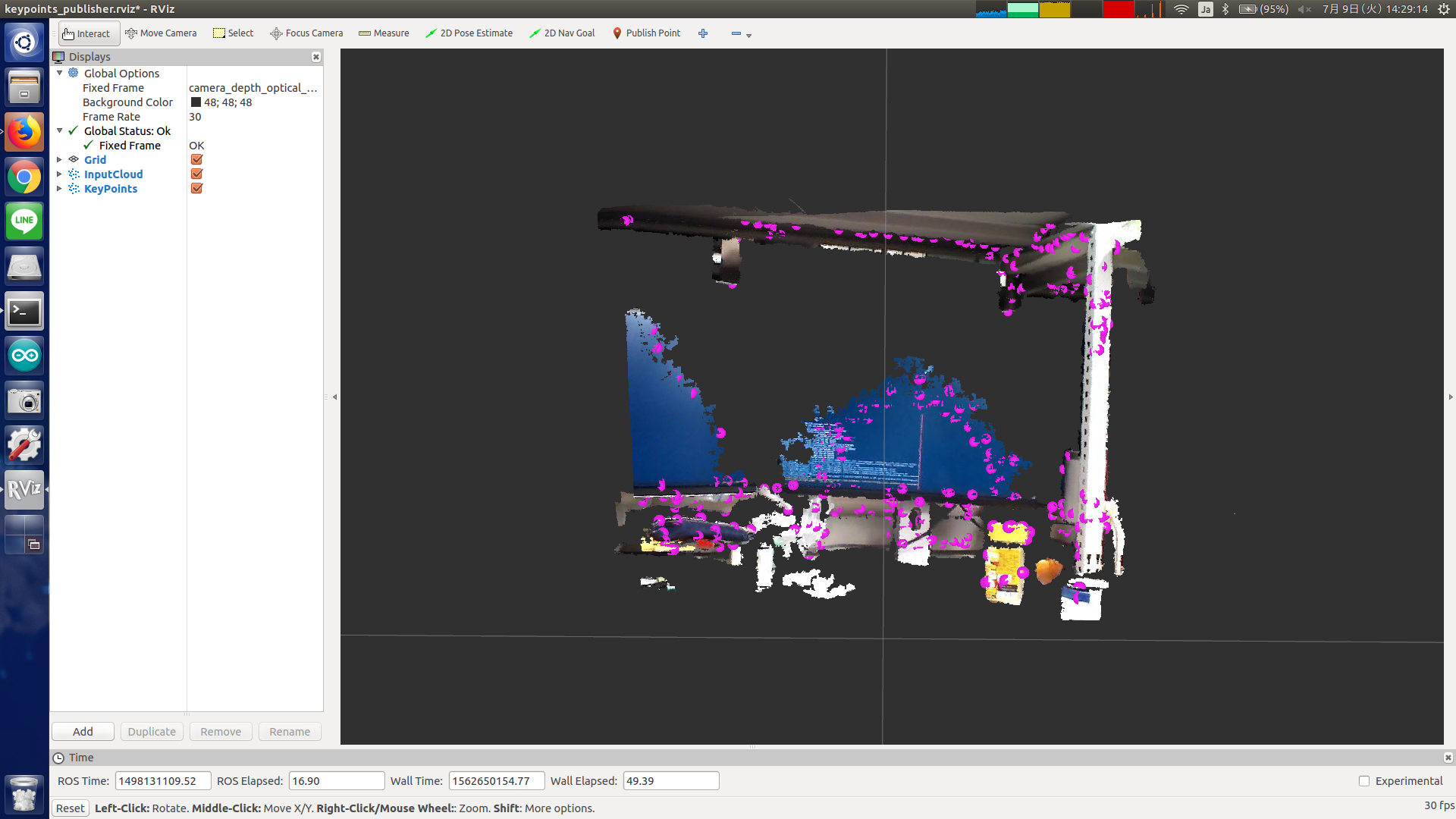
Sample¶
roslaunch jsk_pcl_ros sample_keypoints_publisher.launch