HeightmapConverter¶
Convert a pointcloud(sensor_msgs/PointCloud2) into heightmap representation (sensor_msgs/Image).
Subscribing Topic¶
~input(sensor_msgs/PointCloud2)Input pointcloud
Publishing Topic¶
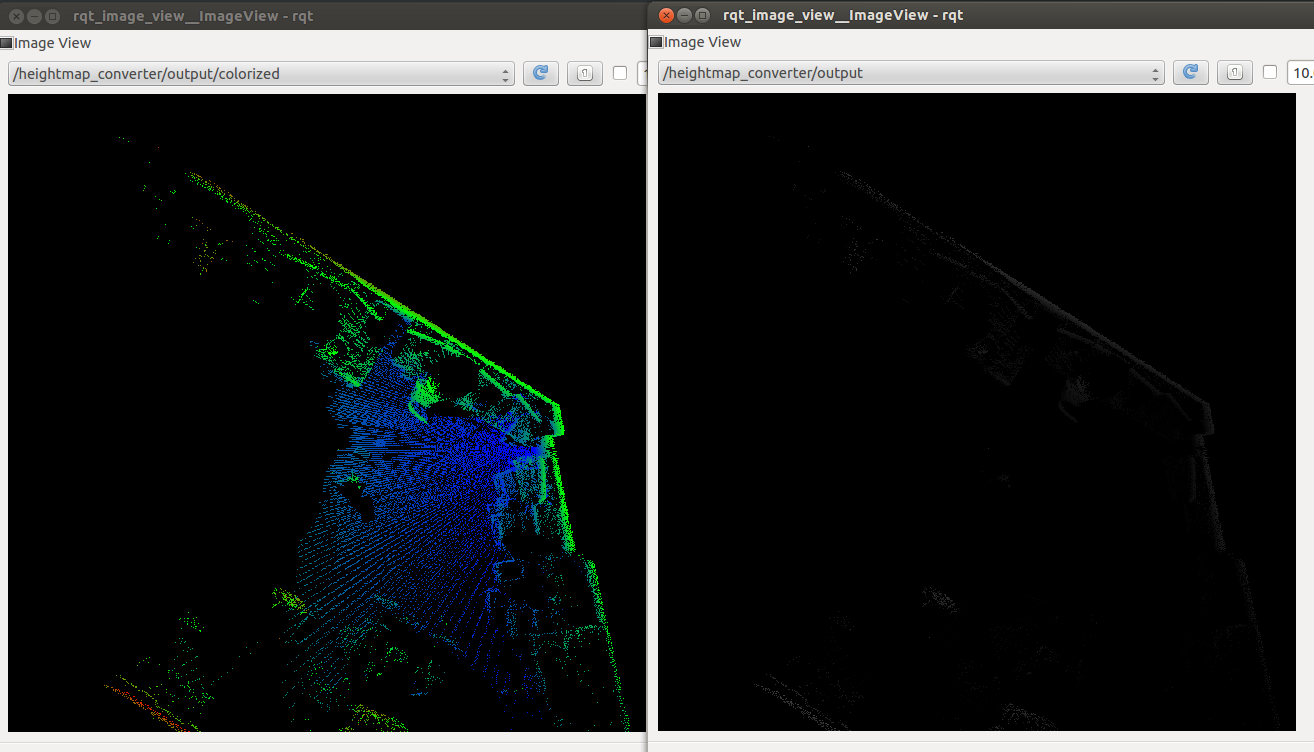
~output(sensor_msgs/Image)fields of the image is
CV_32FC2(float). Channel0 of the image represents heightmap and Channel1 of the image represents quality/intensity/reliability of value. If a pixel is not observed, it is filled by-FLT_MAX.~output/config(jsk_recognition_msgs/HeightmapConfig)Config topic.
Parameters¶
~use_projected_center(Bool, default:False)If true,
~fixed_frame_id,~center_frame_idand~projected_center_frame_idwill be enabled and heightmap will be created at~center_frame_id.If false, heightmap will be created at input point cloud frame.
~fixed_frame_id(String, default:map)Parent frame ID of
~projected_center_frame_id.~center_frame_id(String, default:BODY)Frame ID of center of output heightmap.
~projected_center_frame_id(String, default:BODY_on_map)Name of new frame ID used in
~output.~resolution_x(Integer, default:400)~resolution_y(Integer, default:400)Width and height of the output height map in pixels.
These parameters can be changed by
dynamic_reconfigure.~min_x(Double, default:-2.0)~max_x(Double, default:2.0)~min_y(Double, default:-2.0)~max_y(Double, default:2.0)Minimum and maximum value of heightmap dimension in meters.
These parameters can be changed by
dynamic_reconfigure.~initial_probability(Double, default:1.0)Initial value to be set to Channel1 of heightmap image
This parameter can be changed by
dynamic_reconfigure.
Sample¶
roslaunch jsk_pcl_ros sample_heightmap_converter.launch