PointcloudScreenpoint¶
What is this¶
Use pointcloud from kinect

Use pointcloud from laser
Use amplifiered pointclouds published by laser
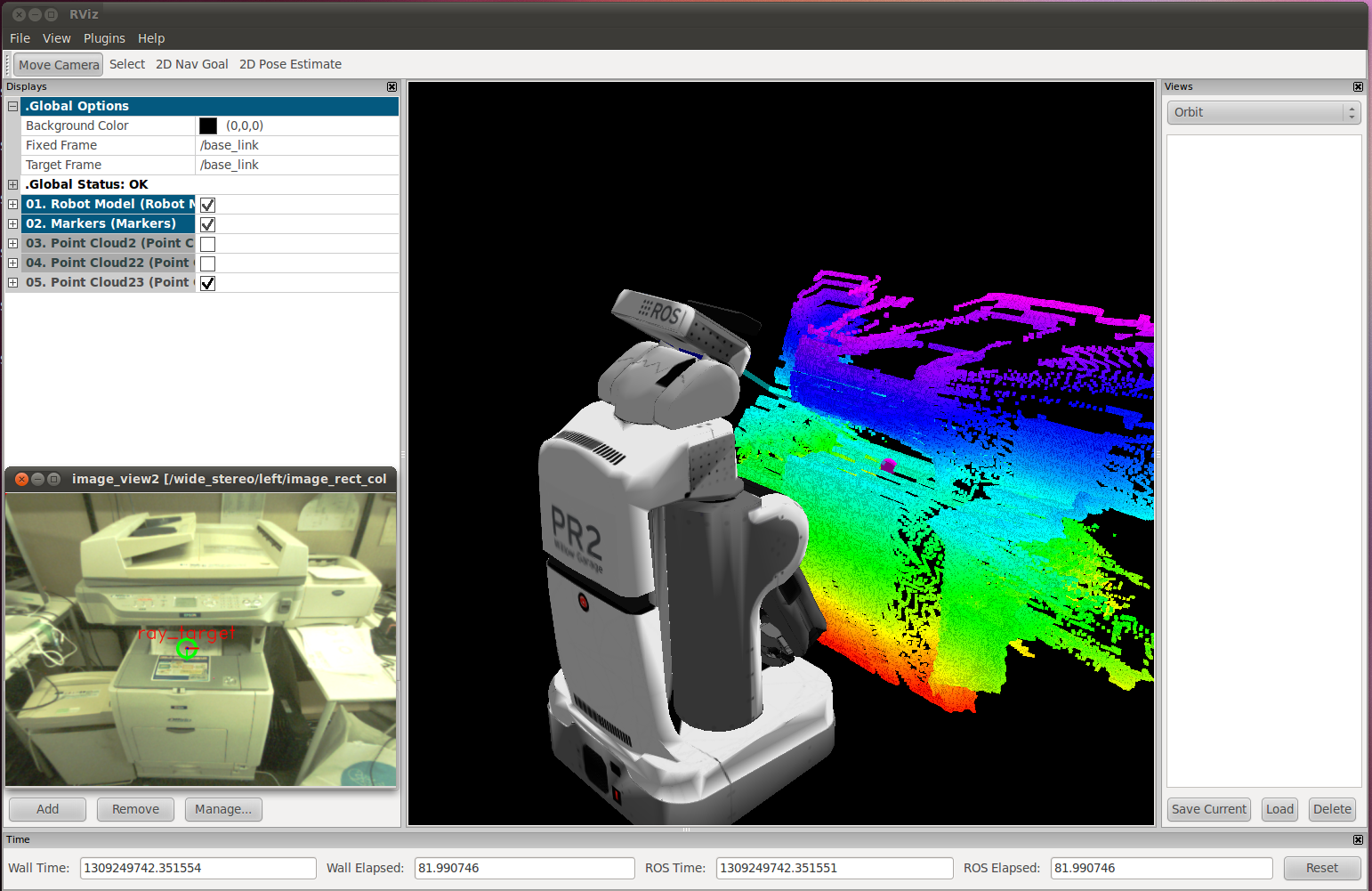
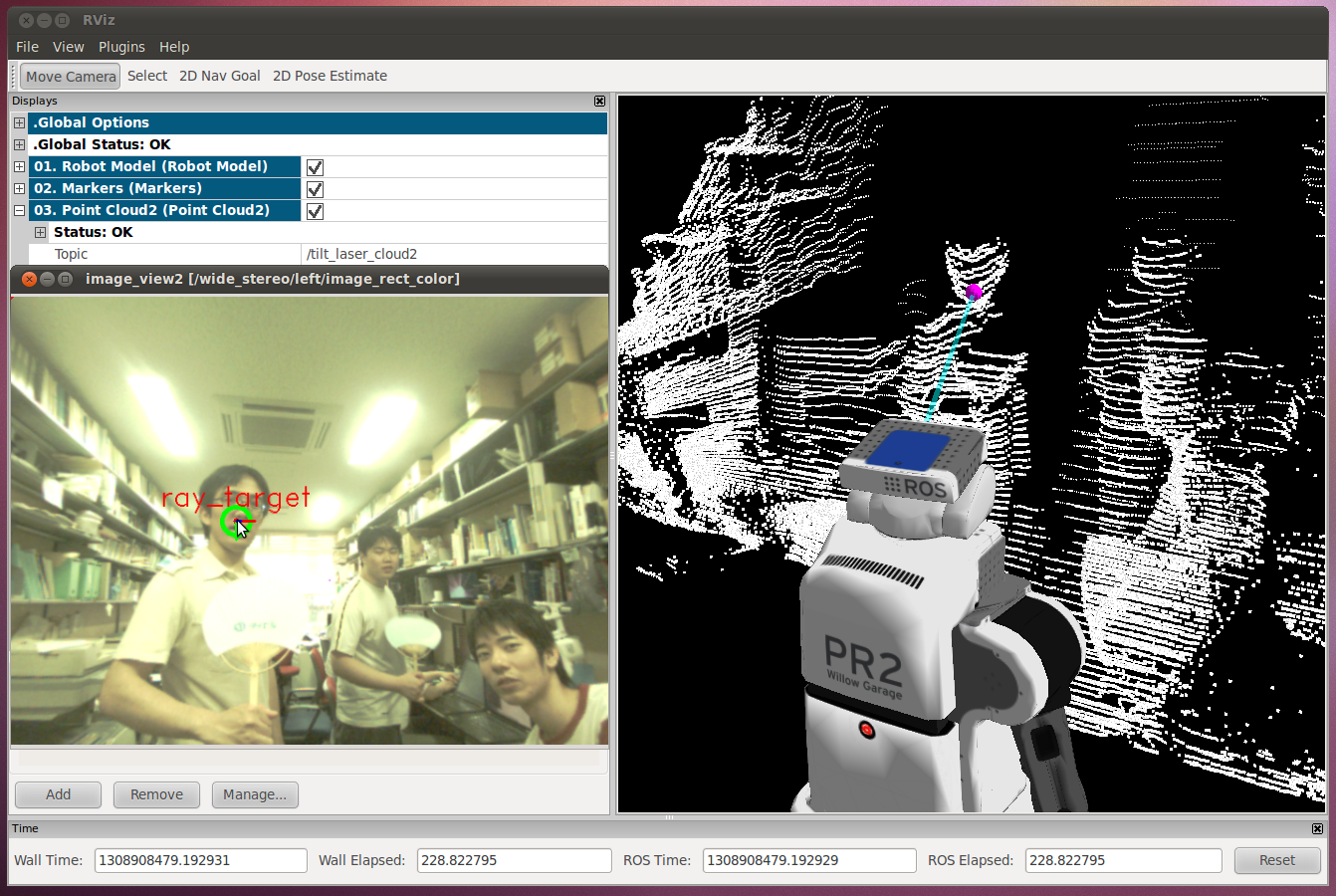
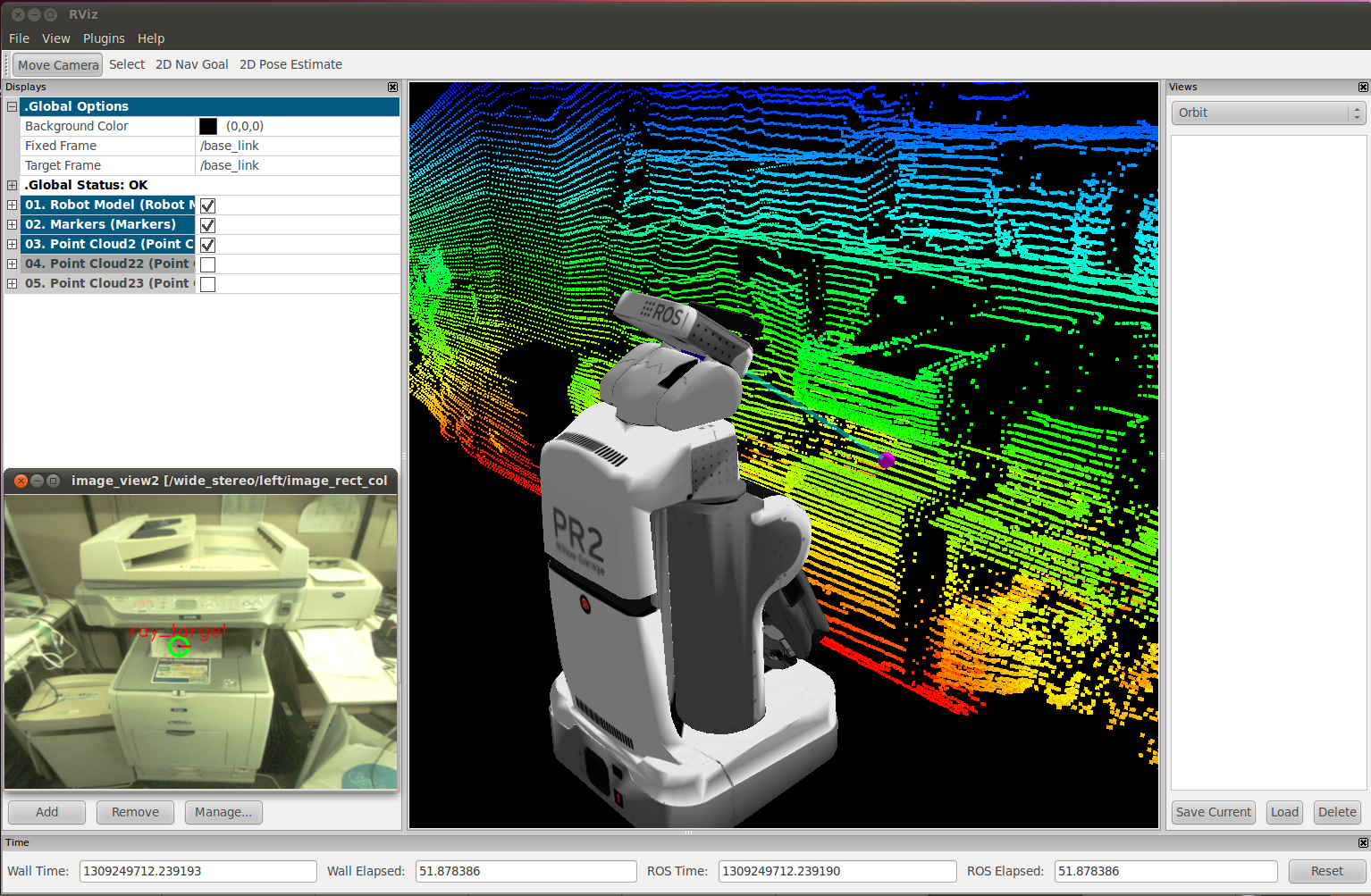
This is a nodelet to convert (u, v) coordinate on a image to 3-D point. It retrieves 3-D environment as pointcloud.
pointcloud_screenpoint_sample.launch is a sample launch file.
Subscribing Topics¶
~points(sensor_msgs/PointCloud2):Pointcloud source to estimate 3D points that the user wantedt to specify on a 2D screen
~point(geometry_msgs/PointStamped):Input point to represent (u, v) image coordinate and this topic is enabled only if
~use_pointparameter is setTrue. Only x and y fileds are used and the header frame_id is ignored. If~use_syncparameter is setTrue,~pointsand~pointare synchronized.~rect(geometry_msgs/PolygonStamped):Input rectangular region on image local coordinates and this topic is enabled only if
~use_rectparameter is setTrue. Only x and y fields are used and the header frame_id is ignored. And the region should be rectangular. If~use_syncparameter is setTrue,~poly(geometry_msgs/PolygonStamped):`Input polygonal region in image local coordinates.
~point_array(sensor_msgs/PointCloud2):Input points to represent series of (u, v) image coordinate and this topic is enabled only if
~use_point_arrayparameter is setTrue. Only x and y fields are used and the header frame_id is ignored. If~use_syncparameter is setTrue,~point_arrayand~pointare synchronized.
Publishing Topics¶
~output_point(geometry_msgs/PointStamped):The topic to be used to publish one point as a result of screenpoint.
~output(sensor_msgs/PointCloud):The topic to be used to publish series of points as a result of screenpoint.
~output_polygon(geometry_msgs/PolygonStamped):Projected points of
~rector~poly.
Advertising Servicies¶
~screen_to_point(jsk_pcl_ros::TransformScreenpoint):ROS Service interface to convert (u, v) image coordinate into 3-D point.
The definition of
jsk_pcl_ros::TransformScreenpointis:
# screen point
float32 x
float32 y
---
# position in actual world
std_msgs/Header header
geometry_msgs/Point point
geometry_msgs/Vector3 vector
With int this service, the latest pointcloud acquired by ~points is used to convert (u, v) into 3-D point.
Parameters¶
~use_sync(Boolean, default:False):If this parameter is set to
True, the timestamps of 3-D pointcloud and the target point/rectangle/point array are synchronized.~queue_size(Integer, default:1):Queue length of subscribing topics.
~crop_size(Integer, default:10):The size of approximate region if
~pointspointcloud has nan holes.~use_rect(Boolean, default:False):Enable
~polygontopic.~use_poly(Boolean, default:False):Enable
~polytopic.~use_point(Boolean, default:False):Enable
~pointtopic.~use_point_array(Boolean, default:False):Enable
~point_arraytopic.~publish_points(Boolean, default:False):Publish result of screenpoint to
~outputtopic.~publish_point(Boolean, default:False):Publish result of screenpoint to
~output_pointtopic.