BilateralFilter¶
What Is This¶
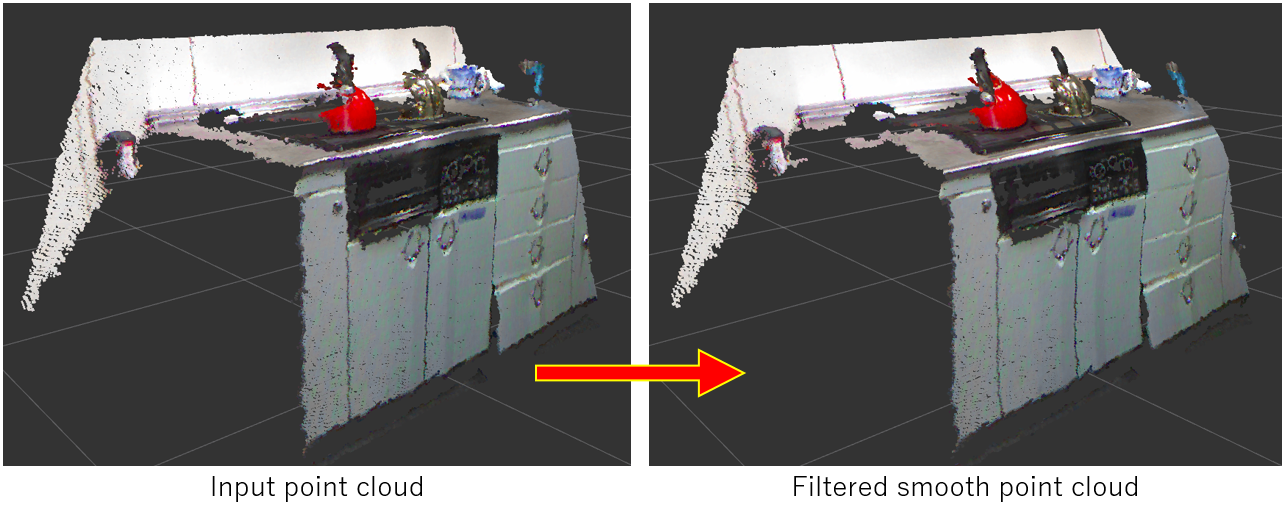
Apply bilateral filter to specified point cloud.
The filter reduces noise, preserves edges and smooth point cloud.
Subscribing Topic¶
~input(sensor_msgs/PointCloud2)Original point cloud.
Publishing Topic¶
~output(sensor_msgs/PointCloud2)Filtered point cloud.
Parameter¶
~sigma_s(Float, default:15.0)
Standard deviation of Gaussian (a.k.a. spatial sigma).
This parameter can be changed by dynamic_reconfigure.
~sigma_r(Float, default:0.05)
Standard deviation of gaussian used to control how much an adjacent pixel is downweighted because of the intensity difference (a.k.a. range sigma).
This parameter can be changed by dynamic_reconfigure.
Sample¶
roslaunch jsk_pcl_ros sample_bilateral_filter.launch