calculate_polygon_from_imu.py¶
What Is This¶
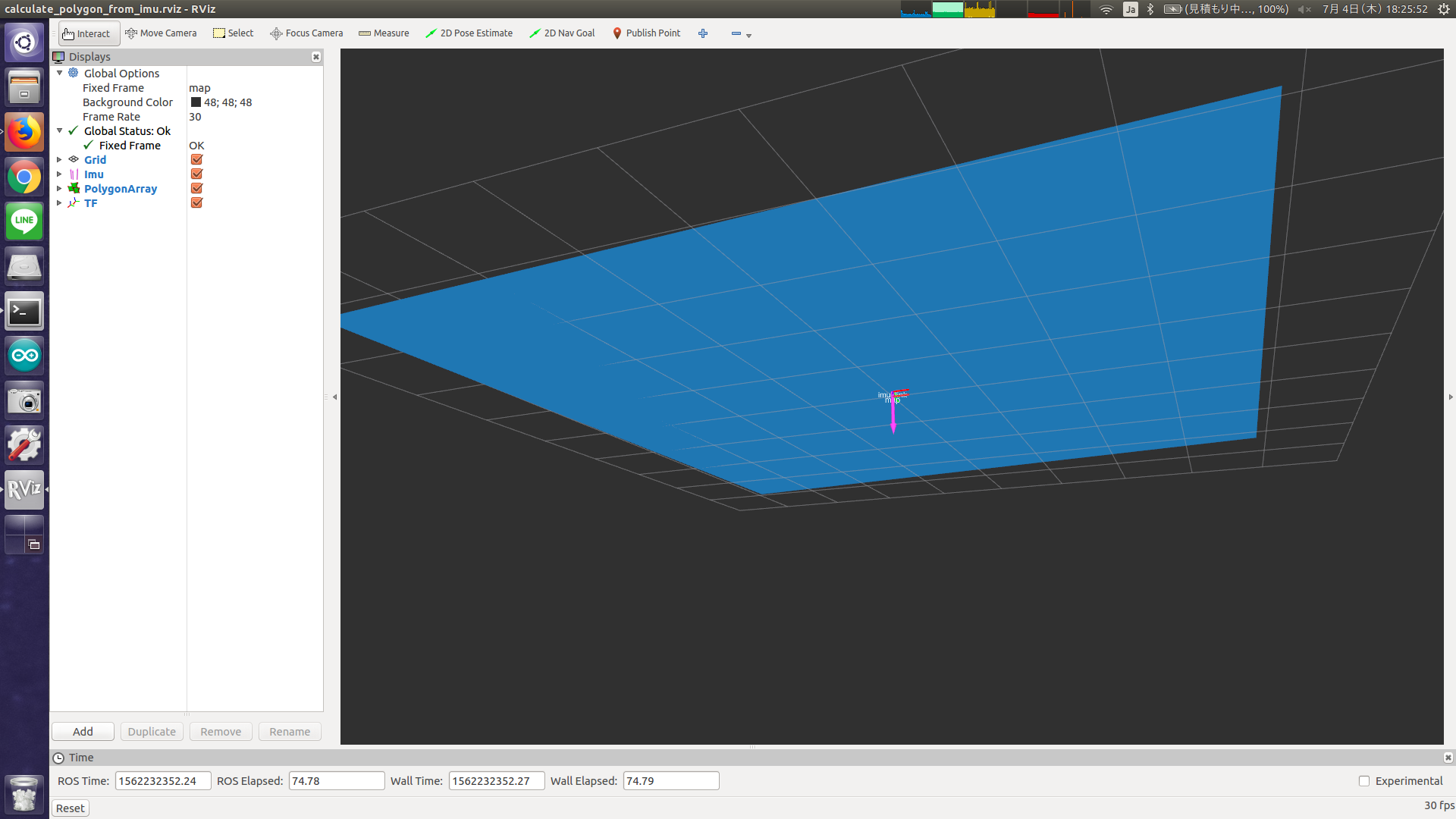
It retrieves sensor_msgs/Imu and publish perpendicular plane as polygon array.
Subscribing Topic¶
imu_data(sensor_msgs/Imu)Imu data. Only
linear_accelerationfield will be used to calculate polygon.
Publishing Topic¶
polygon_array(jsk_recognition_msgs/PolygonArray)Output plane polygon array.
model_coeffients_array(jsk_recognition_msgs/ModelCoefficientsArray)Normal vector of plane.
Parameters¶
None.
Sample¶
roslaunch jsk_pcl_ros sample_calculate_polygon_from_imu.launch