AttentionClipper¶
What Is This¶
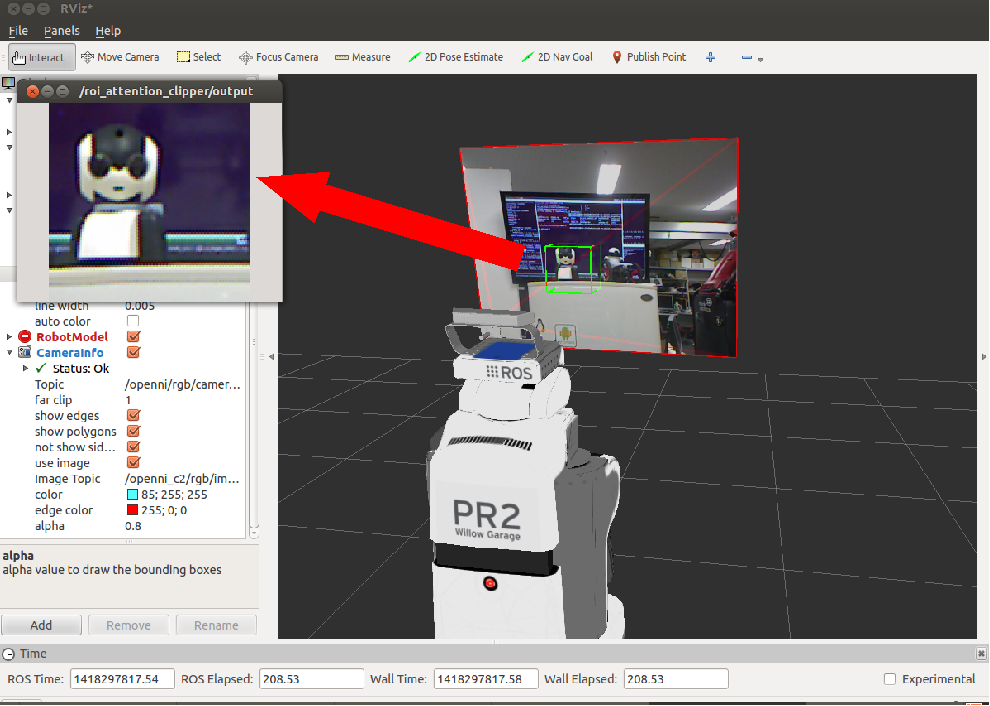
It retrieves sensor_msgs/CameraInfo and publish sensor_msgs/CameraInfo with ROI filled and
retrieves sensor_msgs/PointCloud2 and publish pcl_msgs/PointIndices.
You can specify the pose and size of the interest bounding box and jsk_pcl/AttentionClipper returns ROI to see the object.
Subscribing Topic¶
~input(sensor_msgs/CameraInfo)Original camera info. (You don’t need camera info when you only use pointcloud.)
~input/points(sensor_msgs/PointCloud2)Original pointcloud.
~input/pose(geometry_msgs/PoseStamped)~input/box(jsk_recognition_msgs/BoundingBox) Specify the pose of the bounding box. Timestamp will be ignored and camera info’s timestamp will be used. If you use~input/box, you can change the size of attention region. There callbacks are only enabled if~use_multiple_attentionis false.~input/pose_array(geometry_msgs/PoseArray)~input/box_array(jsk_recognition_msgs/BoundingBoxArray) It’s an array version of~input/poseand~input/box. There callbacks are only enabled if~use_multiple_attentionis true.
Publishing Topic¶
~output(sensor_msgs/CameraInfo)This camera info is same with
~inputexcept for roi field. (only when~inputis published.)~output/box_array(jsk_recognition_msgs/BoundingBoxArray)Array of bounding boxes representing the interest regions.
~output/mask(sensor_msgs/Image)Mask image to mask the regions of specified interest. (only when
~inputis published.)~output/point_indices(pcl_msgs/PointIndices)Indices of
~input/pointswhich are inside of interest regions.~output/cluster_point_indices(jsk_recognition_msgs/ClusterPointIndices)Cluster point indices of
~input/pointswhich are inside of interest regions.
Parameter¶
~use_multiple_attention(Boolean, default:False)If you want to enable multiple attentions, please set this variable True.
~dimension_x(Double, default:0.1)~dimension_y(Double, default:0.1)~dimension_z(Double, default:0.1)Size of bounding box. Available only if
~use_multiple_attentionis false.~frame_id(String, default:base_link)Frame id of attention region. Available only if
~use_multiple_attentionis false.~initial_pos(Array of double, default:None):Initial pose of interesting region. Available only if
~use_multiple_attentionis false.~initial_rot(Array of double, default:None):Initial orientation of interesting region. The value should be represented in [roll, pitch, yaw]. Available only if
~use_multiple_attentionis false.~initial_pos_list(Array of array of double, default:None)~initial_rot_list(Array of array of double, default:None)~frame_id_list(Array of string, default:None)~dimensions(Array of array of double, default:None)~prefixes(Array of string, default:None)Position, Rotation, frame id ,prefix and Dimensions of multiple attention regions respectively.
~iniital_pos_listshould follow[[x, y, z], ...],~initial_rot_listshould follow[[rx, ry, rz], ...]and~dimensionsshould follow[[x, y, z], ...].~prefixes[prefix1, prefix2, ...]. These prefixes will add to the /point_indices and advertise Available only if~use_multiple_attentionis true.~negative(Boolean, default:False)Publish points which are not inside of attention regions if this parameter is true.
Sample¶
roslaunch jsk_pcl_ros sample_attention_clipper.launch