ExtractCuboidParticlesTopN¶
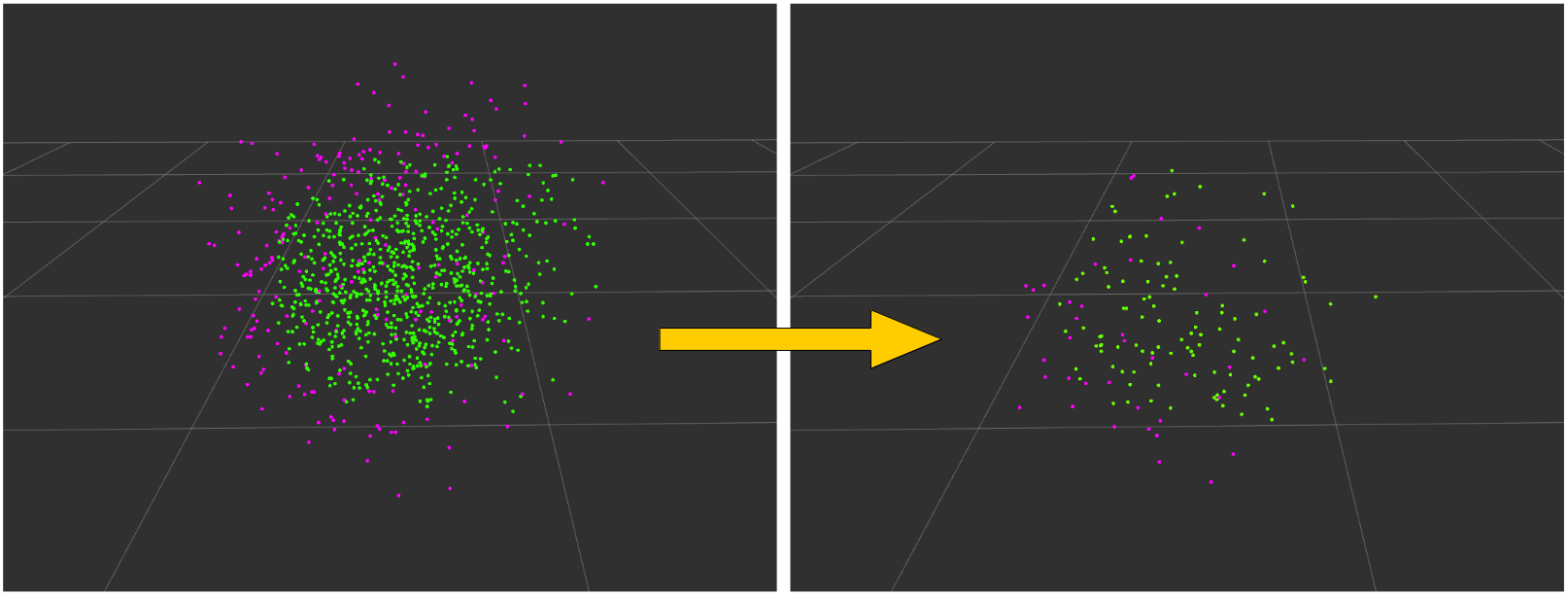
Extract top-N particles of pcl::tracking::ParticleCuboid by comparing weight of them.
Publishing Topics¶
~output(pcl_msgs/PointIndices)Top-N particles indices.
~output/box_array(jsk_recognition_msgs/BoundingBoxArray)Top-N particles as BoundingBoxArray.
~output/pose_array(jsk_recognition_msgs/WeightedPoseArray)Top-N particles as WeightedPoseArray.
Subscribing Topics¶
~input(sensor_msgs/PointCloud2)Particle cloud of
pcl::tracking::ParticleCuboid. All the weights are expected to be normalized.
Parameters¶
~top_n_ratio(Float, default:0.9)Ratio of top-N.
Sample¶
roslaunch jsk_pcl_ros sample_extract_cuboid_particles_top_n.launch