HintedHandleEstimator¶
Detect a handle grasp pose from pointcloud and point as hint.
Subscribing Topic¶
~cloud(sensor_msgs/PointCloud2)Input pointcloud
~point(geometry_msgs/PointStamped)3D Point (You can get from rviz “Publish Point” or image_view2)
Publishing Topic¶
~handle_pose(geometry_msgs/PoseStamped)estimated handle pose
~handle_length(std_msgs/Float64)This topic is advertised but not published for now.
~handle(jsk_recognition_msgs/SimpleHandle)Estimated handle pose with handle width.
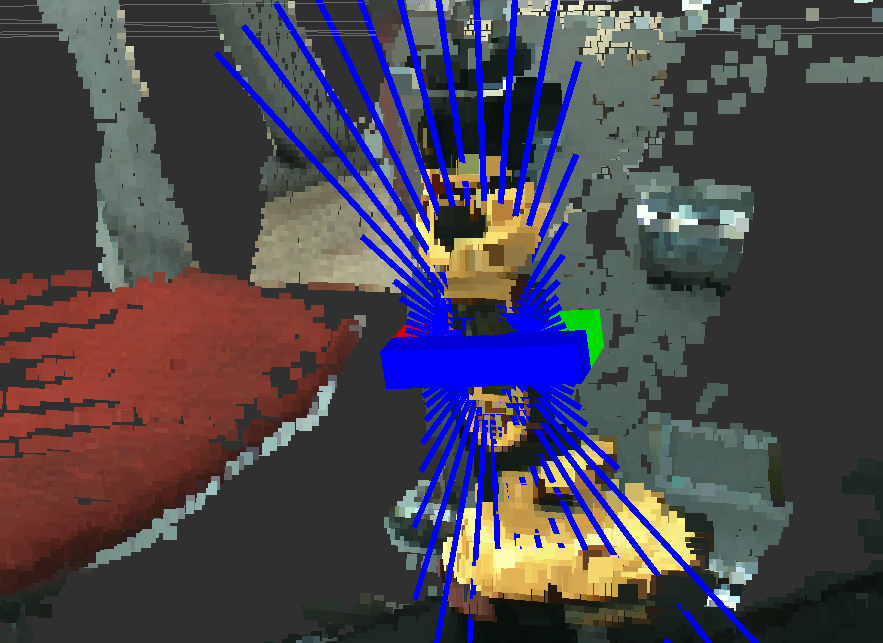
~debug_marker(visualization_msgs/Marker)the result of calculating handle direction
~debug_marker_array(visualization_msgs/MarkerArray)estimated handle visualization
Parameters¶
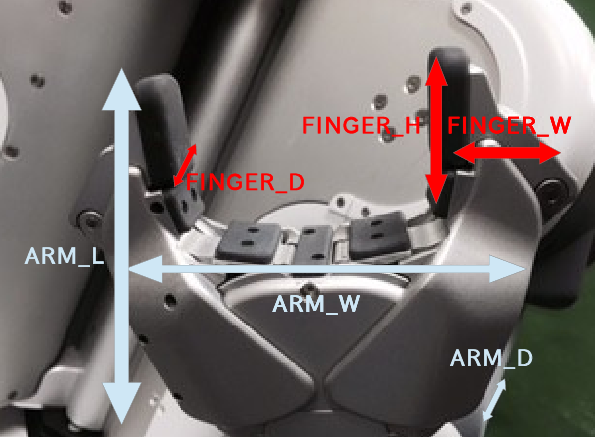
~finger_l(Float, default:0.03)~finger_w(Float, default:0.01)~finger_d(Float, default:0.02)~arm_l(Float, default:0.05)~arm_w(Float, default:0.1)~arm_d(Float, default:0.02)
Sample¶
roslaunch jsk_pcl_ros sample_hinted_handle_estimator.launch