HandleEstimator¶
What Is This¶
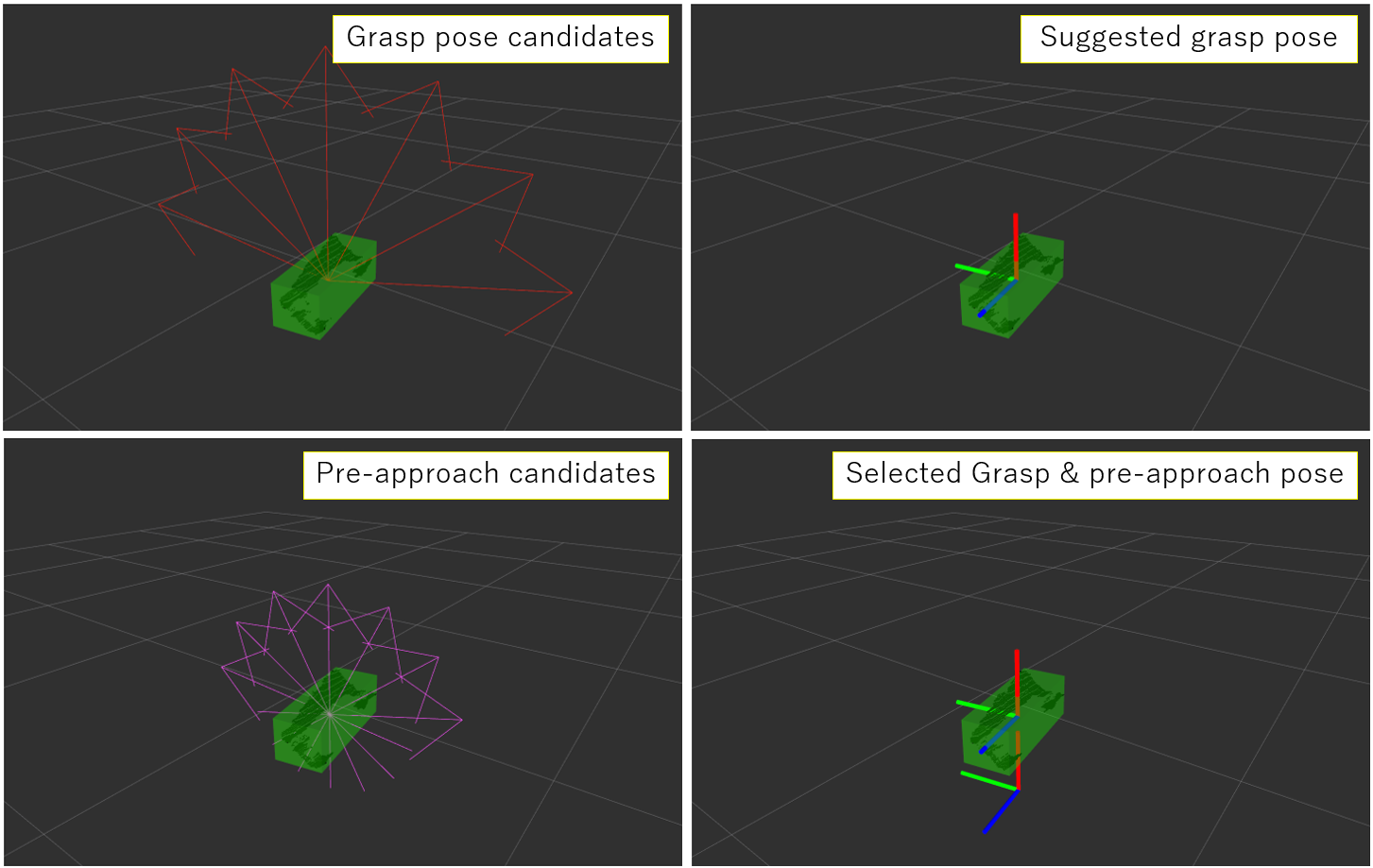
Estimate 6-DOF grasp pose candidates using bounding box.
This node is similar to jsk_pcl_ros/detect_graspable_poses_pcabase.py, but the differences are …
- Publish pre-approach pose or not.
- Candidates are the same position but different pose (former), or different position but the same pose (latter).
This node can also publish only selected pose.
Subscribing Topic¶
~input(sensor_msgs/PointCloud2)Input point cloud.
Currently this topic is not used for estimation, but required.
It must be synchronized with
~input_box.~input_box(jsk_recognition_msgs/BoundingBox)Input bounding box.
Dimensions of bounding box are used to estimate handle type internally.
So it is recommended that the box is aligned to the object using PCA or so.
~selected_index(jsk_recognition_msgs/Int32Stamped)Pose index chosen from indices of
~outputand~output_preapproach.
Publishing Topic¶
~output(geometry_msgs/PoseArray)Grasp pose candidates.
~output_preapproach(geometry_msgs/PoseArray)Pre-approach poses of
~output.~output_best(geometry_msgs/PoseStamped)Suggested best grasp pose chosen from
~output.~output_selected(geometry_msgs/PoseStamped)Grasp pose selected by
~selected_index.~output_selected_preapproach(geometry_msgs/PoseStamped)Pre-approach poses of
~output_selected_preapproach.
Parameter¶
~gripper_size(Float, default:0.08)Gripper width of robot in meters.
If all dimensions of input box are greater than this parameter, then the box will be estimated as ungraspable.
~approach_offset(Float, default:0.1)Offset from grasp point in meters.
This parameter is used for calculating
~output_preapproach.~angle_divide_num(Int, default:6)Number of grasp pose candidates.
Sample¶
roslaunch jsk_pcl_ros sample_handle_estimator.launch