NormalEstimationIntegralImage¶
Subscribing Topics¶
~input(sensor_msgs/PointCloud2)Input point cloud. (point type is
pcl::PointXYZRGB)
Publishing Topics¶
~output(sensor_msgs/PointCloud2)Output normals. (point type is
pcl::Normal)~output_with_xyz(sensor_msgs/PointCloud2)Output point cloud with normal field. (point type is
pcl::PointXYZRGBNormal)
Parameters¶
max_depth_change_factor(Double, default: 0.02)max depth change factor
normal_smoothing_size(Double, default: 20.0)normal smoothing size parameter
estimation_method(Int, default: 1)Estimation method.
- 0: AVERAGE_3D_GRADIENT
- 1: COVARIANCE_MATRIX
- 2: AVERAGE_DEPTH_CHANGE
depth_dependent_smoothing(Boolean, default: false)Use depth dependent smoothing.
border_policy_ignore(Boolean, default: true)Ignore border policy.
Parameters above can be changed by dynamic_reconfigure.
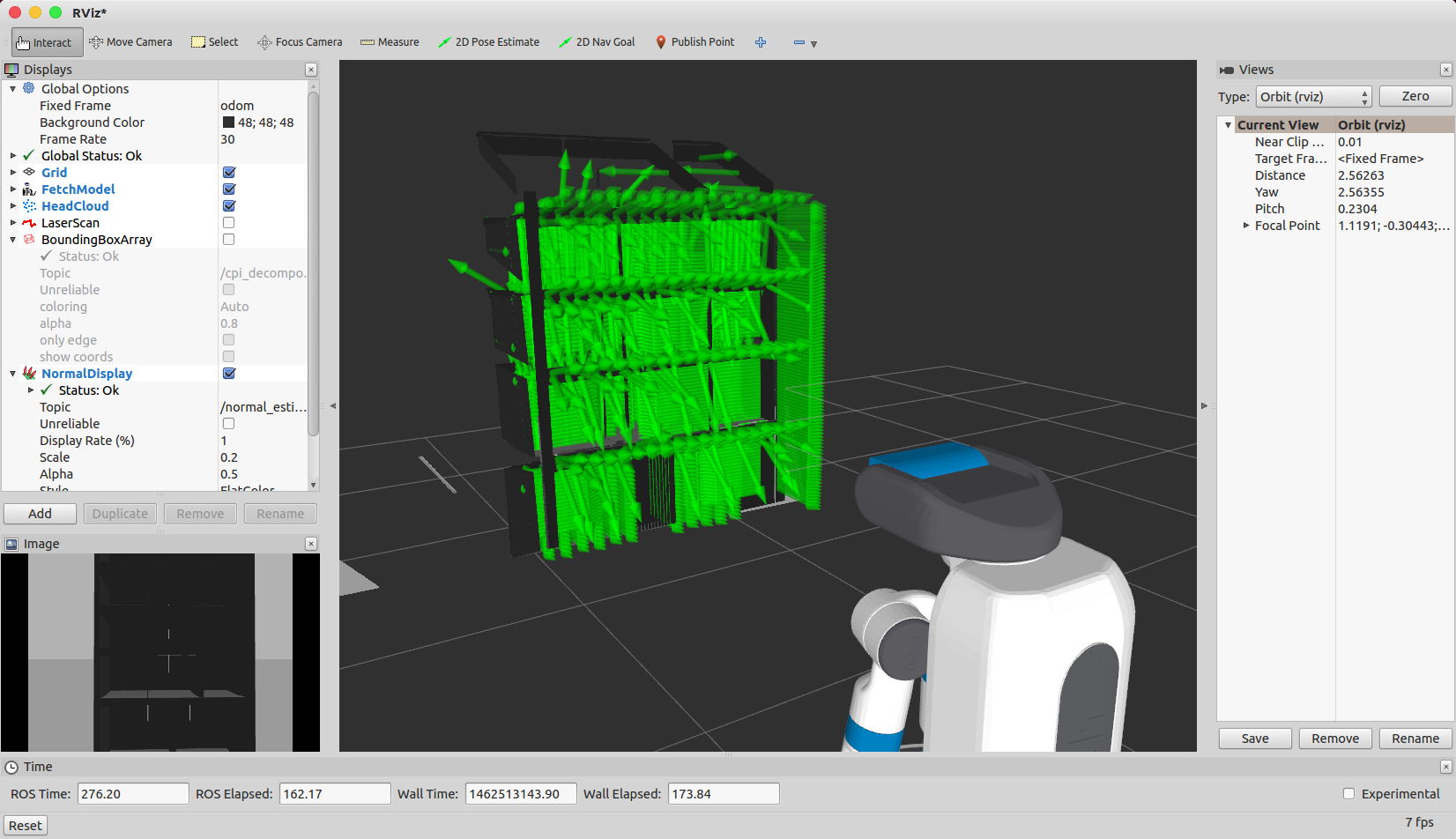
Sample¶
roslaunch jsk_pcl_ros sample_normal_estimation_integral_image.launch