NormalEstimationOMP¶
This nodelet is almost the same as pcl/NormalEstimationOMP of pcl_ros package,
but it can handle timestamp correctly.
Subscribing Topic¶
~input(sensor_msgs/PointCloud2)Input pointcloud. Point type is
pcl::PointXYZRGB.
Publishing Topic¶
~output(sensor_msgs/PointCloud2)Output pointcloud, point type is
pcl::Normal.~output_with_xyz(sensor_msgs/PointCloud2)Output pointcloud, point type is
pcl::PointXYZRGBNormal.~output/latest_time(std_msgs/Float32)latest computation time
~output/average_time(std_msgs/Float32)average computation time
Parameters¶
~number_of_threads(Int, default:0)Number of hardware threads to use.
If
0is specified, the number will be automatically determined.~k_search(Int, default:10)Number of k-nearest neighbors to search for.
This parameter can be changed by
dynamic_reconfigure.~radius_search(Float, default:0.0)Sphere radius for nearest neighbor search.
This parameter can be changed by
dynamic_reconfigure.
Note that either ~k_search or ~radius_search must be set to 0.
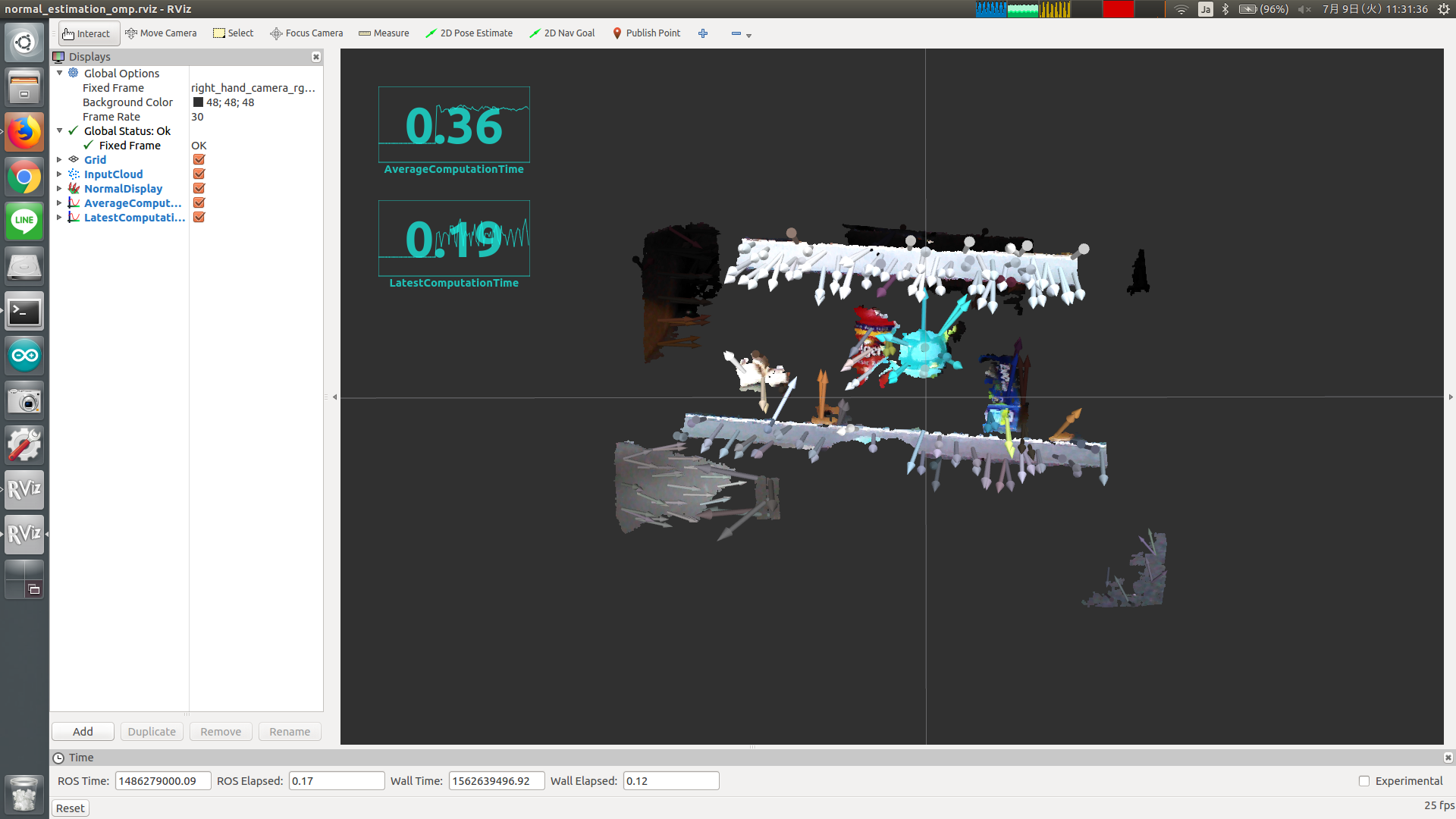
Sample¶
roslaunch jsk_pcl_ros sample_normal_estimation_omp.launch