SphericalPointCloudSimulator¶
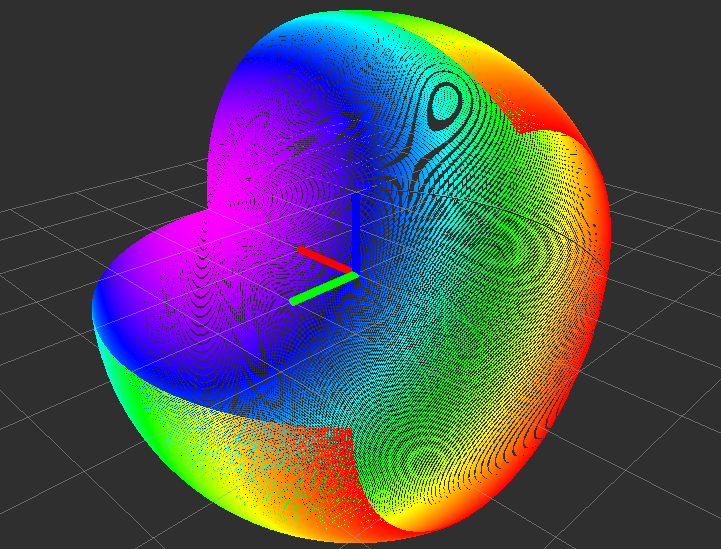
Simulate a pointcloud which is acquired by spindle laser. Sensor model is spherical laser.
Subscribing Topics¶
~input(sensor_msgs/PointCloud2)This topic is only used to synchronize timestamp of
~outputpointcloud to certain pointcloud. If no~frame_idis specified, frame_id of~inputis copied to~output.
Publishing Topics¶
~output(sensor_msgs/PointCloud2)Simulated pointcloud.
Parameters¶
~frame_id(String, default: None)frame_id of output pointcloud. If not specified, frame_id of
~inputis copied.~r(Double, default:3.0)Radius of spherical model.
~min_phi(Double, default:0.0)Minimum angle of scanning plane.
~max_phi(Double, default:2pi)Maximum angle of scanning plane.
~scan_range(Double, default:4.7)Scan range of laser. The default value is same to hokuyo’s parameter.
~scan_num(Integer, default:1081)The number of points in one scan of laser. The default value is same to hokuyo’s parameter.
~fps(Double, default:40)Fps of laser sensor. The default value is same to hokuyo’s parameter.
Sample¶
roslaunch jsk_pcl_ros laser_camera_fov_sample.launch