CollisionDetector¶
What Is This¶
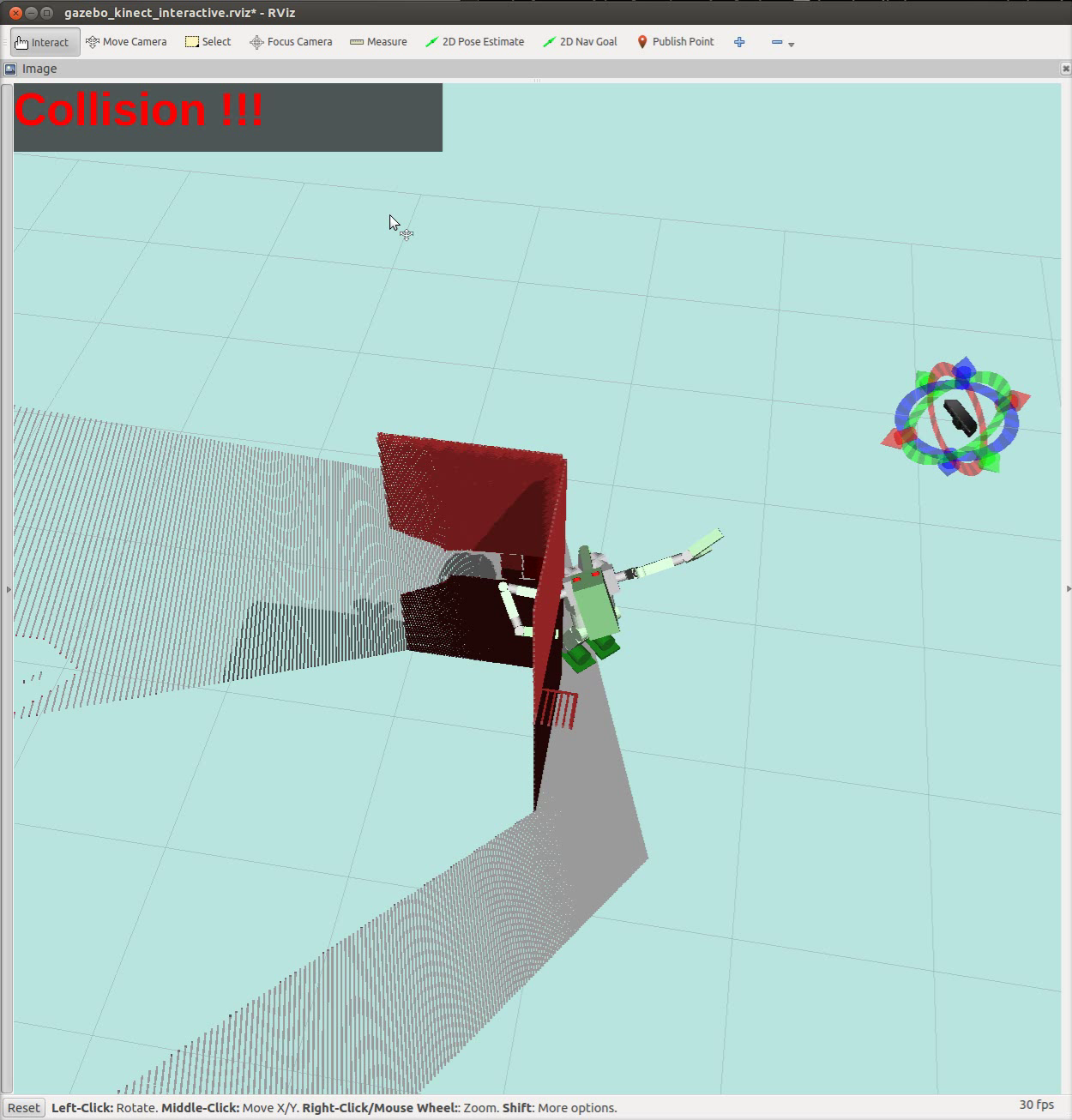
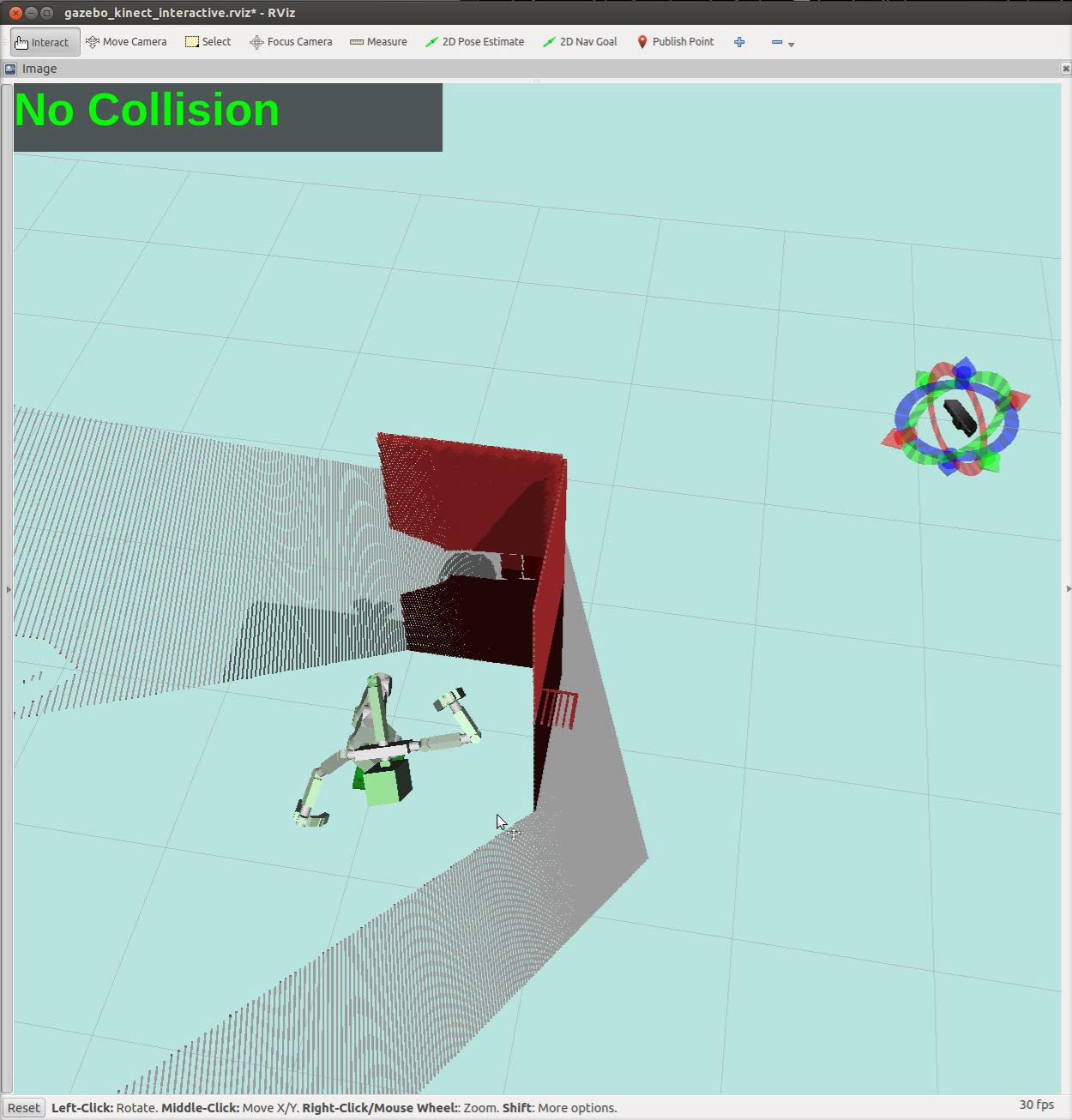
Collision check between robot model and point cloud.
This node has service interface. You can request collision check by service.
Subscribing Topics¶
~input(sensor_msgs/PointCloud2):input pointcloud.
Publishing Topics¶
None.
Advertising Services¶
~check_collision(jsk_recognition_msgs/CheckCollision):Service interface to check collision.
jointis the joint state of robot.poseis the pose of root link, which is specified by the parameter~root_link_id.
sensor_msgs/JointState joint
geometry_msgs/PoseStamped pose
---
bool result
Parameters¶
~world_frame_id(String, default:map)World frame_id.
~robot_description(String, required)robot_description of the collision-checked robot. The namespace is private, so you can specify the robot, which is different from global robot_description.
~root_link_id(String, default:BODY)The name of robot root link.
~self_see_default_padding(Double, default:0.01)Same as the parameter in self_filter. Padding of robot link in collision check.
~self_see_default_scale(Double, default:1.0)Same as the parameter in self_filter. Scale of robot link in collision check.
~self_see_links(Array of link configuration, required)Same as the parameter in self_filter. Configuration of links for collision check. Link configuratin consists of name (required), padding (optional), and scale (optional).
~publish_tf(Boolean, default:False)Publish tf of robot links. This is useful to display robot model in Rviz.
Sample¶
roslaunch jsk_pcl_ros sample_collision_detector.launch