virtual_camera_mono¶
Calculate perspective transformation from TF frame and apply it to the input image.
Subscribing Topics¶
image(sensor_msgs/Image)Input image.
camera_info(sensor_msgs/CameraInfo)Input camera info.
This topic name is resolved from
imageby image_transport.view_point(geometry_msgs/TransformStamped, optional)Pose of virtual camera relative to
~frame_id.This pose is initialized from
~initial_posand~initial_rot.target_polygon(geometry_msgs/PolygonStamped, optional)Target plane polygon.
The polygon is initialized from
[[0, 1, 0], [0, -1, 0], [0, -1, -1], [0, 1, -1]].
Publishing Topics¶
~image(sensor_msgs/Image)Output image to which perspective transformation was applied.
~camera_info(sensor_msgs/CameraInfo)Camera info of virtual camera.
Parameters¶
~frame_id(String, default:/elevator_inside_panel)Target frame ID.
~child_frame_id(String, default:/virtual_camera_frame)Frame ID of virtual camera used in published topics.
~initial_pos(List of Float, default:[0.7, 0.0, 0.0])Initial position of virtual camera relative to
~frame_id.~initial_rot(List of Float, default:[0.5, 0.5, -0.5, -0.5])Initial rotation of virtual camera relative to
~frame_idin quaternion.~interpolation_method(Int, default:1)Choose from
INTER_NEAREST (0),INTER_LINEAR (1),INTER_AREA (2),INTER_CUBIC (3)andINTER_LANCZOS4 (4).This parameter can be changed by
dynamic_reconfigure.
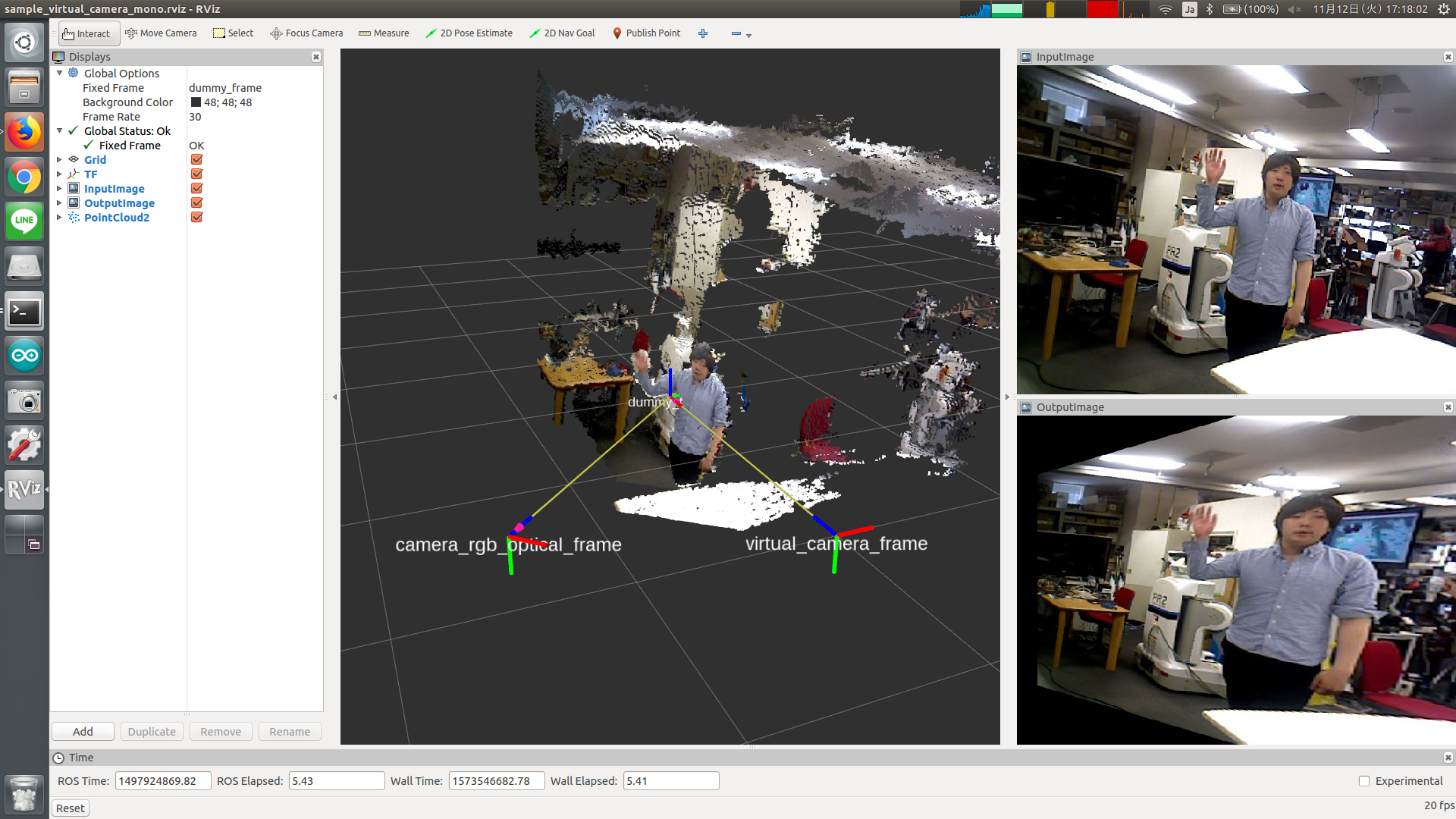
Sample¶
roslaunch jsk_perception sample_virtual_camera_mono.launch