fast_rcnn.py¶
What is this?¶
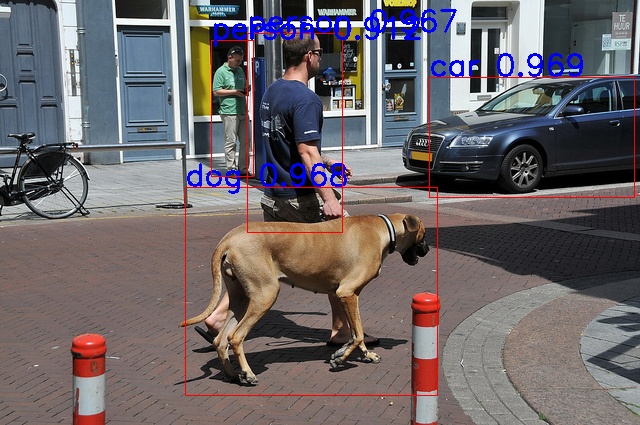
Publish an image with object bounding boxes, scores and labels.
CLASSES = ('__background__',
'aeroplane', 'bicycle', 'bird', 'boat',
'bottle', 'bus', 'car', 'cat', 'chair',
'cow', 'diningtable', 'dog', 'horse',
'motorbike', 'person', 'pottedplant',
'sheep', 'sofa', 'train', 'tvmonitor')
Subscribing Topic¶
~input(sensor_msgs/Image)Raw image.
~input/rect_array(jsk_recognition_msgs/RectArray)Object location proposals.
Publishing Topic¶
~output/class(jsk_recognition_msgs/ClassificationResult)Detected object class labels and probabilities.
~output/rect_array(jsk_recognition_msgs/RectArray)Rects of detected objects.
Parameters¶
~model(String, required)Network model name. (
vgg_cnn_m_1024orvgg16)vgg_cnn_m_1024is small network and requires ~2GB GPU memory.vgg16is large network and requires ~5GB GPU memory.~gpu(Int, default:-1)GPU ID. Negative value means CPU mode.
~classifier_name(String, default:rospy.get_name())Classifier name written to
classifierfield of~output/class.~approximate_sync(Bool, default:False)Whether to use approximate for input topics.
~queue_size(Int, default:10)How many messages you allow about the subscriber to keep in the queue. This should be big when there is much difference about delay between two topics.
~slop(Float, default:0.1)How many seconds you allow about the difference of timestamp when you specify
~approximate_sync.