BoundingBoxToRect¶
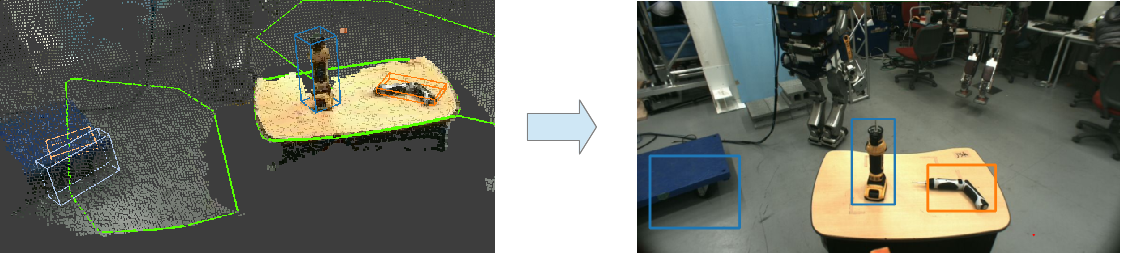
Convert jsk_recognition_msgs/BoundingBoxArray to jsk_recognition_msgs/RectArray.
Subscribing Topics¶
~input(jsk_recognition_msgs/BoundingBoxArray)Input bounding boxes.
~input/info(sensor_msgs/CameraInfo)CameraInfo to project bounding boxes.
~internal(jsk_recognition_msgs/BoundingBoxArrayWithCameraInfo)Internal topic to synchronize timestamp of
~inputand~input/info.
Publishing Topics¶
~output(jsk_recognition_msgs/RectArray)Projected 2-D bounding box.
~internal(jsk_recognition_msgs/BoundingBoxArrayWithCameraInfo)
Parameters¶
~approximate_sync(Bool, default:false)Approximately synchronize
~input/src1and~input/src2if it’s true.~queue_size(Int, default:100) How many messages you allow about the subscriber to keep in the queue.
Example¶

rosrun jsk_perception install_test_data.py
roslaunch jsk_perception sample_bounding_box_to_rect.launch