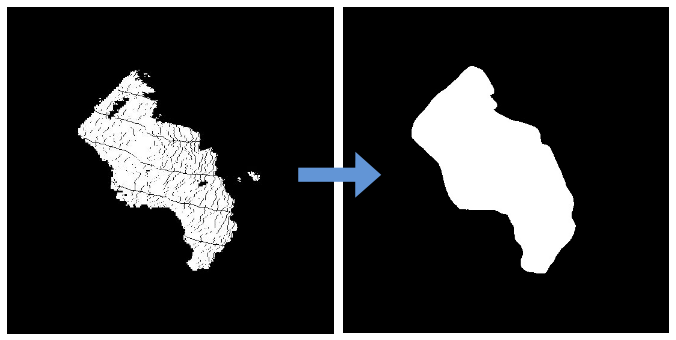
ConcaveHullMaskImage¶
Subscribing Topic¶
~input(sensor_msgs/Image)Input mask image.
Publishing Topic¶
~output(sensor_msgs/Image)Concave hull mask image.
Parameters¶
min_area(Float, default:0)Minimum area of concave.
max_area(Float, default:Image's height * width)Maximum area of concave.
Sample¶
roslaunch jsk_perception sample_concave_hull_mask_image.launch