matchtemplate.py¶
Subscribing Topic¶
reference(sensor_msgs/Image)Input reference image.
search(sensor_msgs/Image)Input image to detect if part of which matches the
reference.set_reference_point(geometry_msgs/PointStamped)Center point of reference window in
referenceimage.set_search_rect(jsk_recognition_msgs/Rect)Searched window rectangle in
searchimage.Please set this to top left point, width and height.
Publishing Topic¶
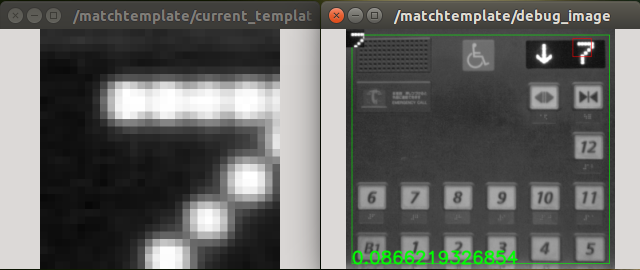
current_template(sensor_msgs/Image)Template image cropped from
reference.result(geometry_msgs/TransformStamped)Pixel index of the center point of matched rectangle.
debug_image(sensor_msgs/Image)Visualization of matching result.
This topic is published only when
~show_debug_imageis set to true.
Parameters¶
~current_template_id(String, default:'')Not used now.
~match_method(Int, default:1)Choose from
TM_SQDIFF (0),TM_SQDIFF_NORMED (1),TM_CCORR (2),TM_CCORR_NORMED (3),TM_CCOEFF (4)andTM_CCOEFF_NORMED (5).~template_color_space(String, default:mono8)Choose from
mono8,bgr8,bgra8,hsv8andhsva8.~show_debug_image(Bool, default:True)Publish
debug_imageif true.~auto_search_area(Bool, default:True)Enable feedback of searching status if true.
~default_template_width(Int, default:32)Allowed value: 0 <= width <= 128.
~default_template_height(Int, default:32)Allowed value: 0 <= height <= 128.
~default_search_width(Int, default:64)Allowed value: 0 <= width <= 256.
~default_search_height(Int, default:64)Allowed value: 0 <= height <= 256.
Sample¶
roslaunch jsk_perception sample_matchtemplate.launch