pointit.py¶
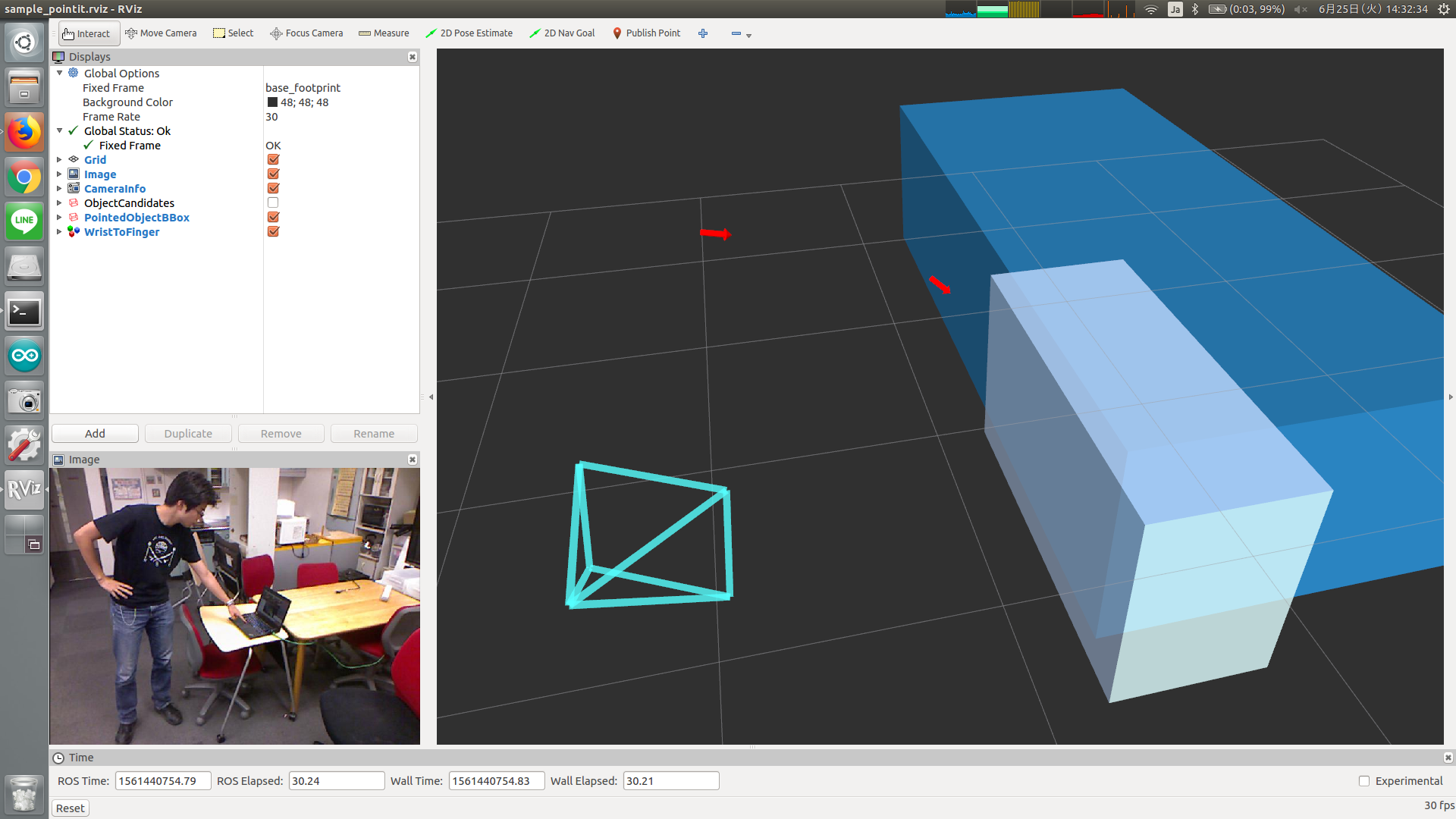
Select object bounding box by human pointing his/her finger toward one of them.
Subscribing Topics¶
~input(jsk_recognition_msgs/PeoplePoseArray)Pose of human pointing his/her finger toward some objects.
~input/boxes(jsk_recogntion_msgs/BoundingBoxArray)Object bounding boxes.
~input/class(jsk_recognition_msgs/ClassificationResult)Label of objects.
This topic is subscribed only when
~use_classfication_resultis True.
Publishing Topics¶
~output(jsk_recognition_msgs/BoundingBoxArray)Pointed object bounding box.
~output/marker_array(visualization_msgs/MarkerArray)Finger marker.
Parameters¶
~use_classfication_result(Bool, default:False)If True, this node will subscribe
~input/class.Also, parameter
~approximate_syncand~queue_sizewill be enabled.~approximate_sync(Bool, default:True)Allow approximate synchronization of
~input/boxesand~input/class.~queue_size(Int, default:10(when~approximate_syncis True) or100(when~approximate_syncis False))Maximum number of messages stored into subscriber for synchronization.
~slop(Float, default:0.1)Maximum allowed time for approximate synchronization in [sec].
This parameter is enabled only when
~approximate_syncis True.~min_dist_threshold(Float, default:0.0)Minimum allowed distance from left/right hand to the nearest object.
~max_dist_threshold(Float, default:0.1)Maximum allowed distance from left/right hand to the nearest object.
~min_norm_threshold(Float, default:0.2)Minimum allowed distance from left/right finger to object candidates.
~use_tf2_buffer_client(Bool, default:True)Whether to use
tf2_ros.BufferClientor not.If false,
tf2_ros.Bufferandtf2_ros.TransformListenerwill be used.
Sample¶
roslaunch jsk_perception sample_pointit.launch