Contents
ROS Packages
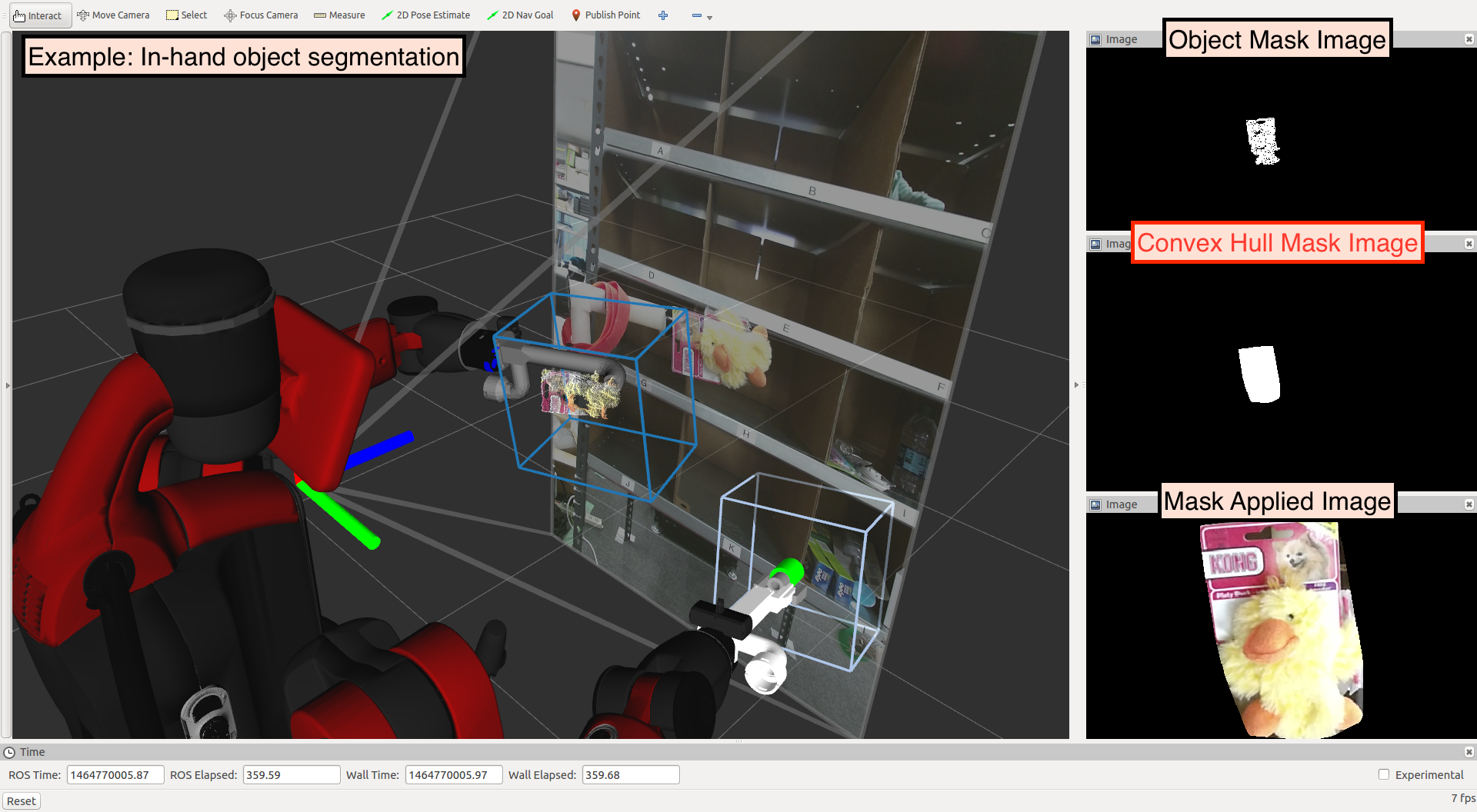
Publish mask that is computed convex hull from the input mask.
~input (sensor_msgs/Image)
~input
sensor_msgs/Image
Input mask image.
~output (sensor_msgs/Image)
~output
Convex hull mask image.
None.
roslaunch jsk_perception sample_convex_hull_mask_image.launch