ColorizeLabels¶
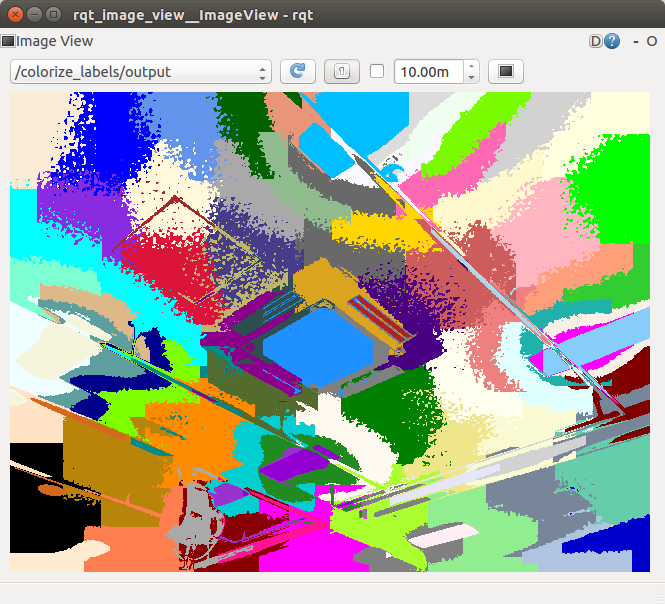
Put colors on the subscribed topic of labeling result
Subscribing Topic¶
~input(sensor_msgs/Image)
input datatype is sensor_msgs/Image but not for normal color image but for labeling result container
Publishing Topic¶
output(sensor_msgs/Image)
Parameters¶
none
Samples¶
rosrun¶
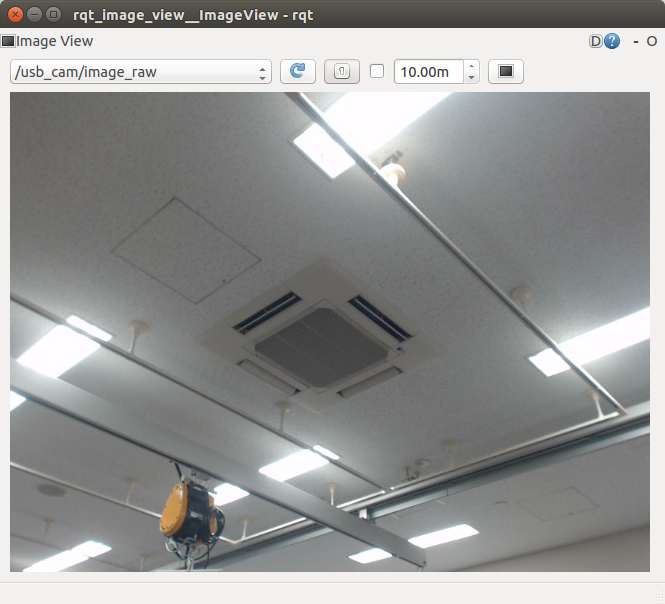
Launch color image publisher anything you like.
rosrun usb_cam usb_cam_node
Run the labeling node anything you like.
rosrun jsk_perception slic_super_pixels image:=/usb_caimage_raw
Run this colorize_labels node with proper remapping.
rosrun jsk_perception colorize_labels ~input:=/slic_super_pixels/output