TransformPointcloudInBoundingBox¶
Subscribing Topic¶
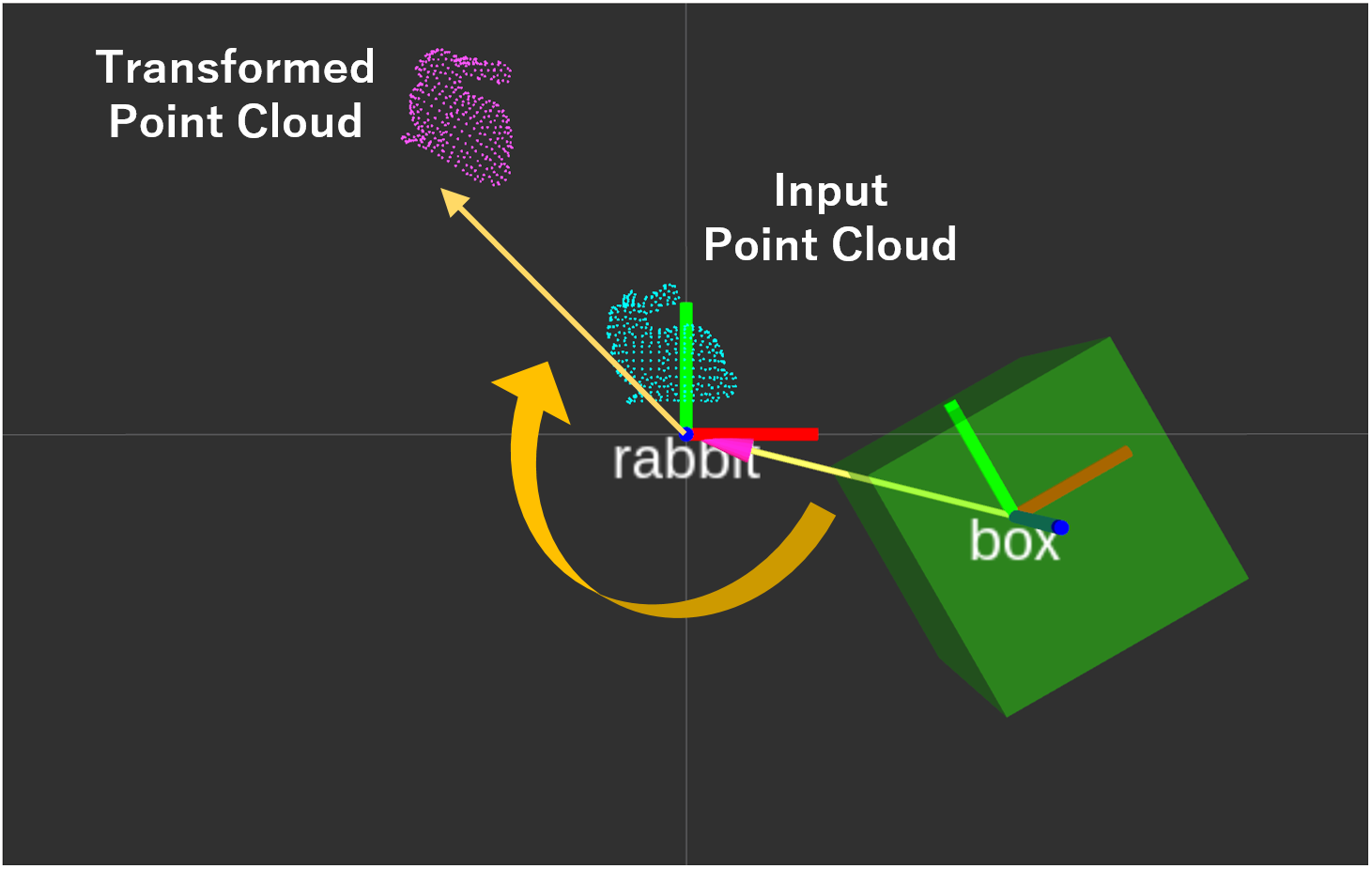
~input(sensor_msgs/PointCloud2)Input point cloud to move.
~input_box(jsk_recognition_msgs/BoundingBox)Input bounding box from which
~inputis moved away.
Publishing Topic¶
~output(sensor_msgs/PointCloud2)Moved point cloud.
~output_offset(geometry_msgs/PoseStamped)This topic is advertised, but currently not published.
Sample¶
roslaunch jsk_pcl_ros_utils sample_transform_pointcloud_in_bounding_box.launch