PolygonArrayAngleLikelihood¶
Compute likelihood based on angular distance. The nearer polygon is, the larger likelihood is.
The likelihood is determined by 1/(1+d^2) where d is a angular difference from ~target_frame_id to the polygon.
Subscribing Topic¶
~input(jsk_recognition_msgs/PolygonArray)Input polygon array.
Publishing Topic¶
~output(jsk_recognition_msgs/PolygonArray)Output polygon array.
Parameters¶
~target_frame_id(String, required)Frame id to compute polygon’s distance from.
~tf_queue_size(Int, Default:10)Queue size of tf message filter
~axis(List of float, Default:[1, 0, 0])Reference direction in
~target_frame_idcoordinates system.
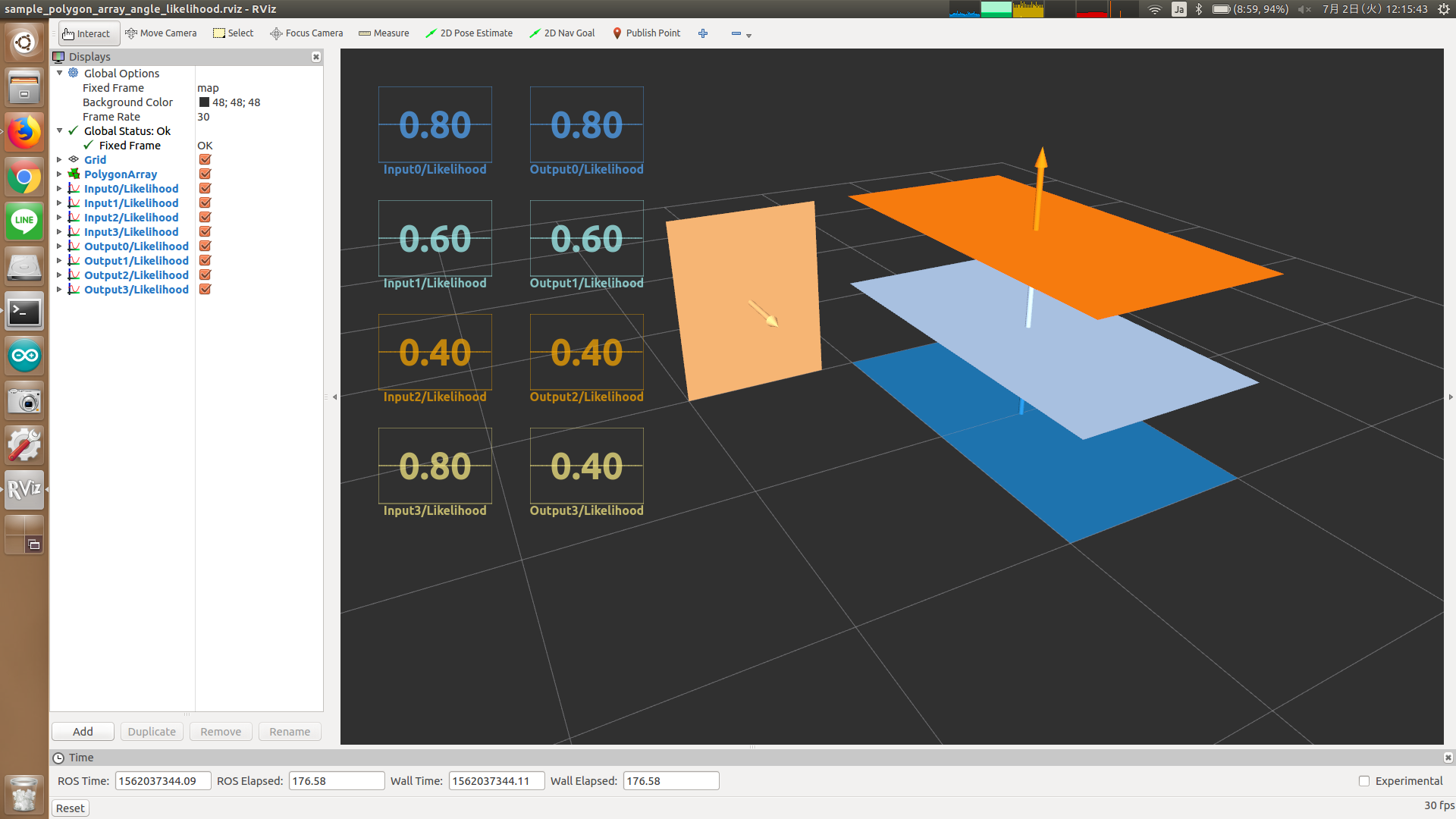
Sample¶
roslaunch jsk_pcl_ros_utils sample_polygon_array_angle_likelihood.launch