SphericalPointCloudSimulator¶
Simulate a pointcloud which is acquired by 3D laser range finder such as tilt laser in PR2.
Subscribing Topics¶
~input(sensor_msgs/PointCloud2)Trigger message to simulate pointcloud.
Only timestamp of this message will be used.
Publishing Topics¶
~output(sensor_msgs/PointCloud2)Simulated spherical pointcloud.
Parameters¶
~rate(Float, default:None)If this parameter is specified, this node will publish
~outputat this rate [Hz], in addition to callback of~input.~frame_id(String, default:~input.header.frame_id)Frame ID of
~output.~r(Float, default:3.0)Radius of spherical point cloud in [m].
This parameter can be changed by
dynamic_reconfigure.~min_phi(Float, default:0.0)~max_phi(Float, default:3.14)Minimum/maximum rotation angle of scanning in [rad].
These parameters can be changed by
dynamic_reconfigure.~scan_range(Float, default:4.71)Range of each scan in [rad].
This parameter can be changed by
dynamic_reconfigure.~scan_num(Int, default:1081)Number of distance observation in each scan.
This parameter can be changed by
dynamic_reconfigure.~fps(Float, default:40.0)Rate of observing each scan in [Hz].
This parameter can be changed by
dynamic_reconfigure.
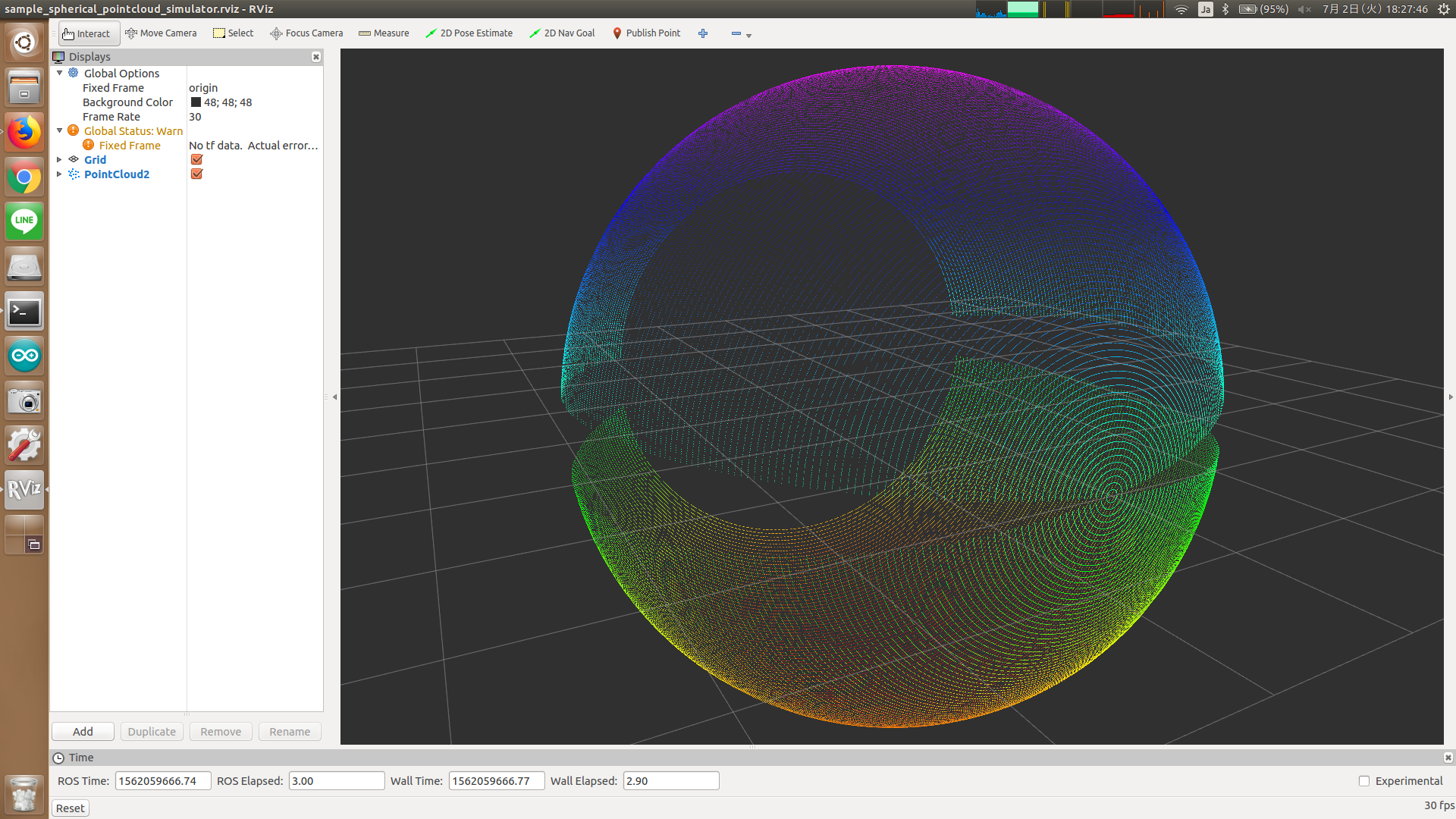
Sample¶
roslaunch jsk_pcl_ros_utils sample_spherical_pointcloud_simulator.launch