TfTransformCloud¶
What Is This¶
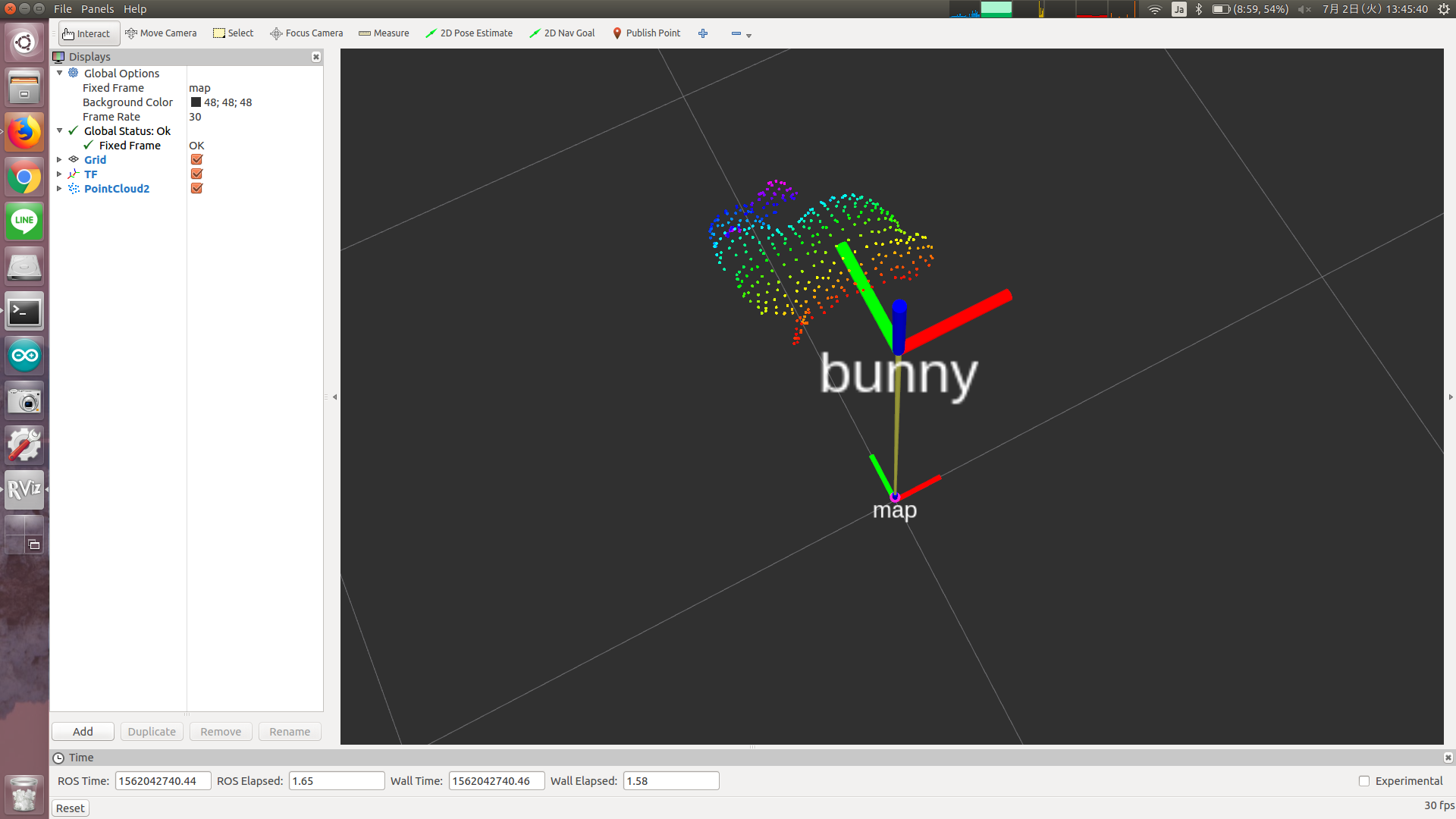
This nodelet will republish the pointcloud which is transformed with the designated frame_id.
Topics¶
- Input
~input(sensor_msgs/PointCloud2): input pointcloud
- Output
~output(sensor_msgs/PointCloud2): output pointcloud.
Parameters¶
~target_frame_id(string, required)The frame_id to transform pointcloud.
~duration(Double, default:1.0)Second to wait for transformation
~use_latest_tf(Bool, default:false)If this parameter is true, ignore timestamp of tf to transform pointcloud.
~tf_queue_size(Int, default:10)Queue size of tf message filter to synchronize tf and
~inputtopic.
Sample¶
roslaunch jsk_pcl_ros_utils sample_tf_transform_cloud.launch