PlaneConcatenator¶
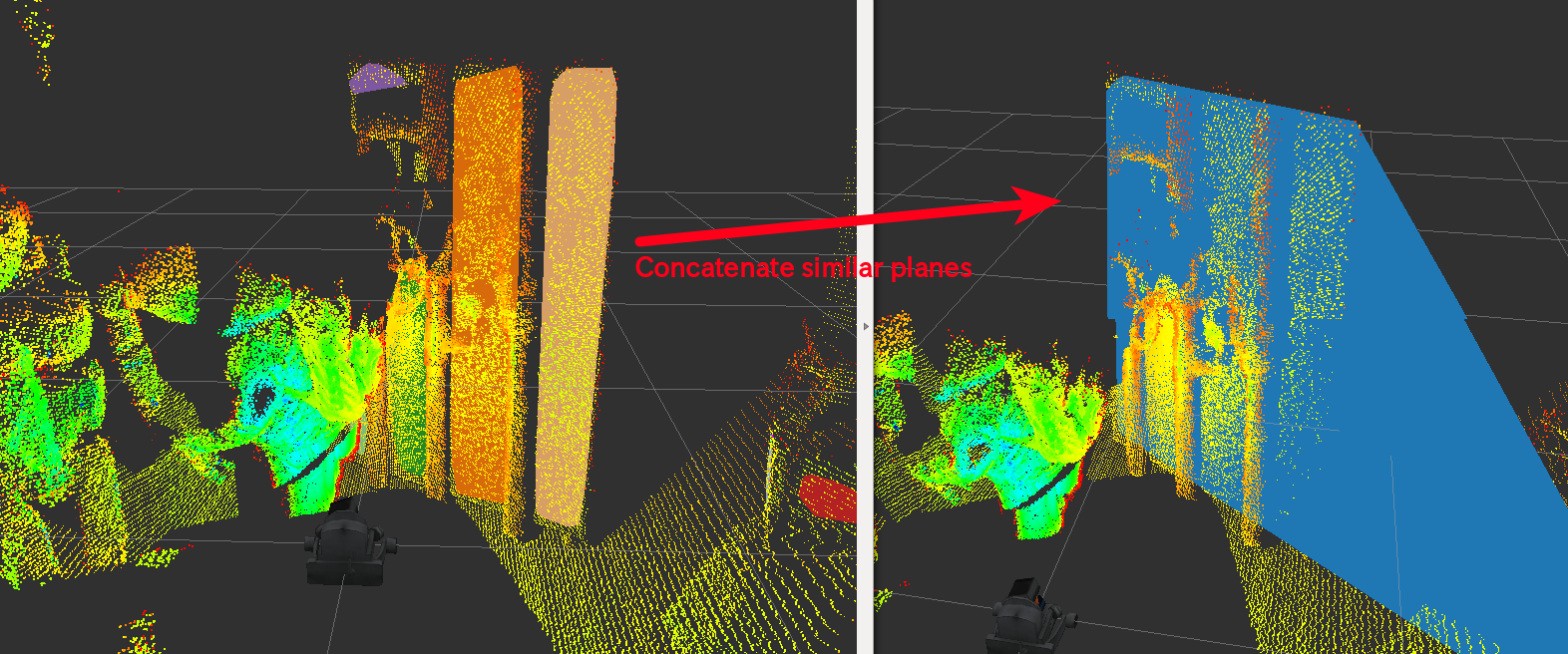
Concatenate near planes and build new set of planes.
Subscribing Topic¶
~input(sensor_msgs/PointCloud2)Input pointcloud.
~input/indices(jsk_recognition_msgs/ClusterPointIndices)~input/polygons(jsk_recognition_msgs/PolygonArray)~input/coefficients(jsk_recognition_msgs/ModelCoefficientsArray)Input planes.
Publishing Topics¶
~output/indices(jsk_recognition_msgs/ClusterPointIndices)~output/polygons(jsk_recognition_msgs/PolygonArray)~output/coefficients(jsk_recognition_msgs/ModelCoefficientsArray)Concatenated planes. Coefficients parameters are refined by RANSAC.
Parameters¶
~connect_angular_threshold(Double, default:0.1)Angular threshold to regard two planes as near.
~connect_distance_threshold(Double, default:0.1)Euclidean distance threshold to regard two planes as near.
~connect_perpendicular_distance_threshold(Double, default:0.1)Distance threshold to connect two planes in perpendicular direction.
~ransac_refinement_max_iteration(Integer, default:100)The maximum number of iteration of RANSAC refinement.
~ransac_refinement_outlier_threshold(Double, default:0.1)Outlier threshold of RANSAC refinmenet.
~ransac_refinement_eps_angle(Double, default:0.1)Eps angle threshold of RANSAC refinment using normal direction of the plane.
~min_size(default:100)Minimum inlier of concatenated polygons.
~min_area(default:0.1)~max_area(default:100.0)Minimum and maximum area of concatenated polygons.
Sample¶
roslaunch jsk_pcl_ros_utils sample_plane_concatenator.launch