MarkerArrayVoxelToPointCloud¶
What is this?¶
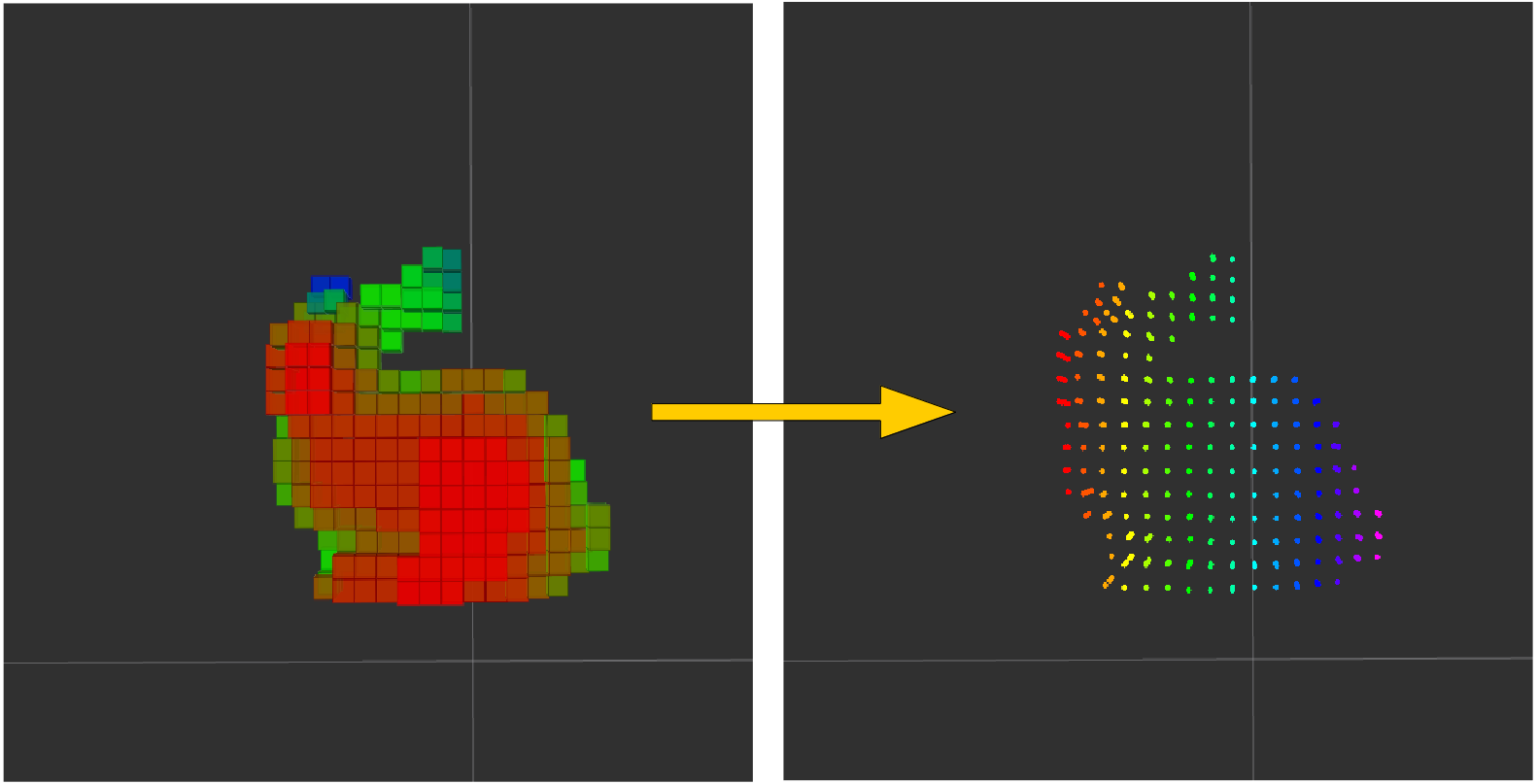
A nodelet to convert marker array into point cloud.
Subscribing Topic¶
~input(visualization_msgs/MarkerArray)Input marker array.
Position of each point will be copied from
pointsfield, while color fromcolorfield.
Publishing Topic¶
~output(sensor_msgs/PointCloud2)Output point cloud converted from
~input.
Parameters¶
None.
Sample¶
roslaunch jsk_pcl_ros_utils sample_marker_array_voxel_to_pointcloud.launch