NormalConcatenater¶
What Is This¶
Concatenate two input point cloud.
One contains xyz and rgb field, and the other contains normal_xyz and curvature field.
Subscribing Topic¶
~input(sensor_msgs/PointCloud2)Point cloud which contains xyz and rgb field.
~normal(sensor_msgs/PointCloud2)Point cloud which contains normal_xyz and curvature field.
Publishing Topic¶
~output(sensor_msgs/PointCloud2)Concatenated point cloud.
Parameter¶
~use_async(Bool, default:False)Whether to enable approximate synchronization policy.
~max_queue_size(Int, default:100)Queue size for message_filters synchronization.
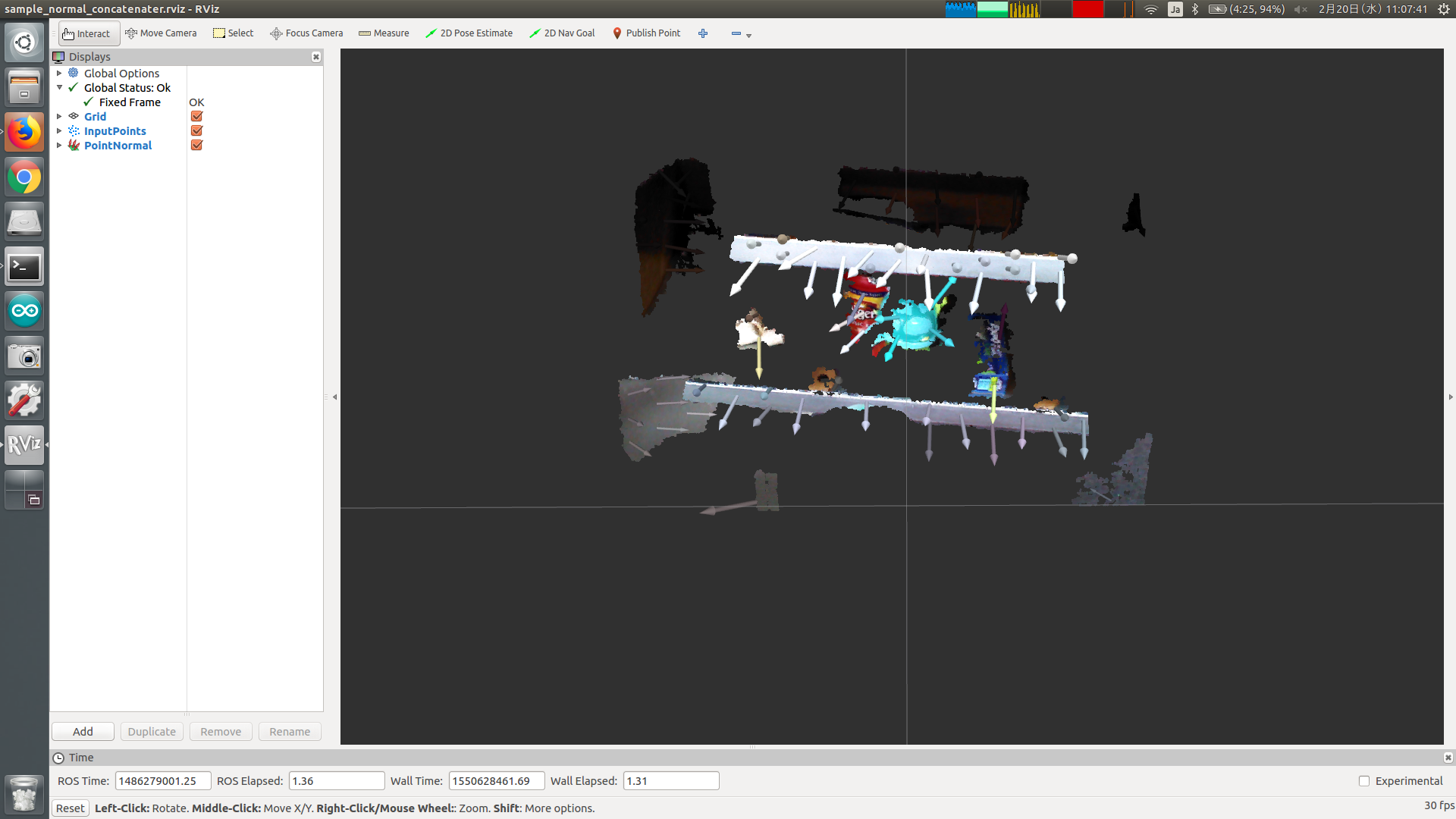
Sample¶
roslaunch jsk_pcl_ros_utils sample_normal_concatenater.launch