PointCloudXYZRGBToXYZ¶
What is this?¶
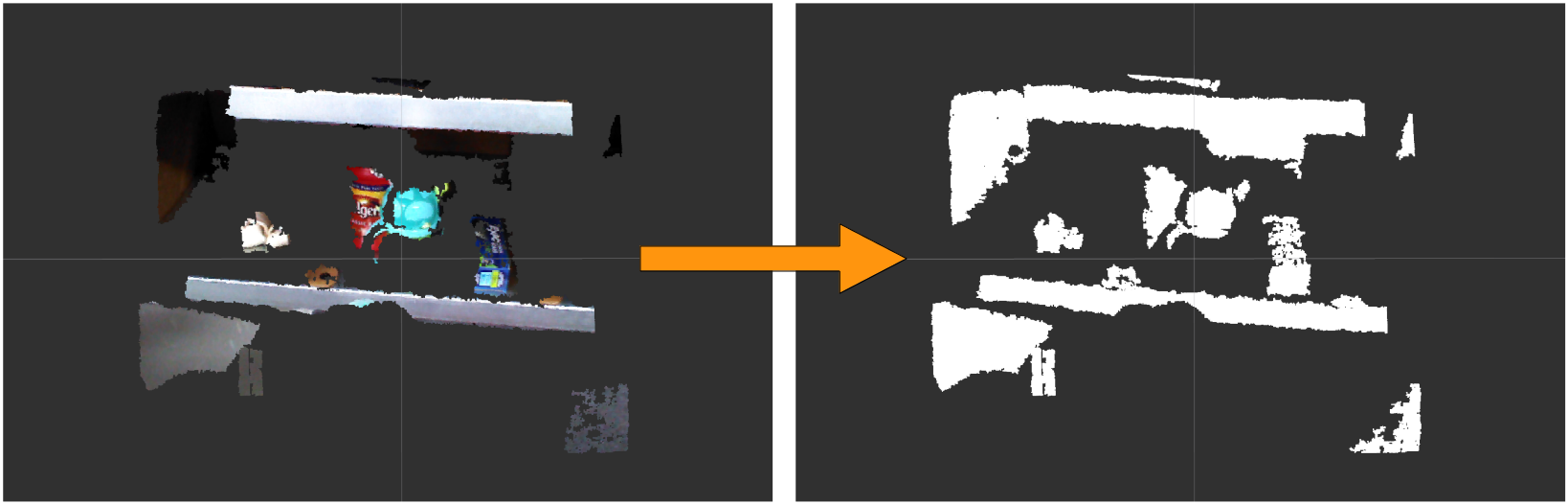
Node to convert fields of sensor_msgs/PointCloud2 from XYZRGB to XYZ.
Subscribing Topic¶
~input(sensor_msgs/PointCloud2)Input cloud whose field is
XYZRGB.
Publishing Topic¶
~output(sensor_msgs/PointCloud2)Output cloud whose field is
XYZ.
Sample¶
roslaunch jsk_pcl_ros_utils sample_pointcloud_xyzrgb_to_xyz.launch