DepthImageError¶
Compute error of depth image and corner point of checker board.
Subscribing Topic¶
~image(sensor_msgs/Image)Input rectified and registered depth image whose encoding is
32FC1(i.e. metric is [m]).~camera_info(sensor_msgs/CameraInfo)Depth_registered camera info.
~point(geometry_msgs/PointStamped)Corner point of checkerboard whose frame_id is the same as rgb image.
x and y field should represent (u, v) point in [pixels], while z field should represent depth in [m].
Publishing Topic¶
~output(jsk_recognition_msgs/DepthErrorResult)Error between depth image and
~point.
Parameters¶
~approximate_sync(boolean, default:false)Use approximate sync if it is true.
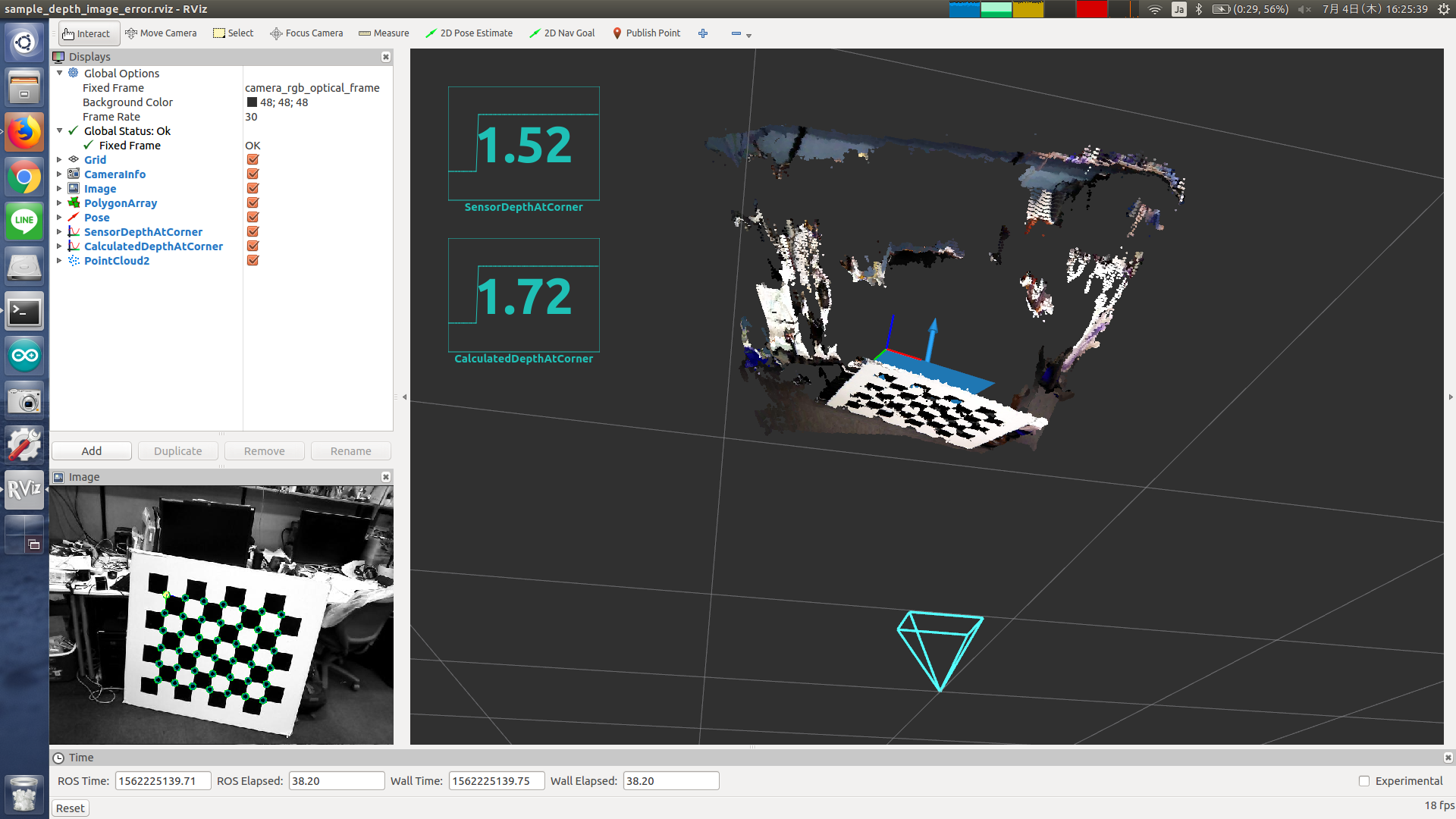
Sample¶
roslaunch jsk_pcl_ros_utils sample_depth_image_error.launch