people_mask_publisher.py¶
What is this?¶
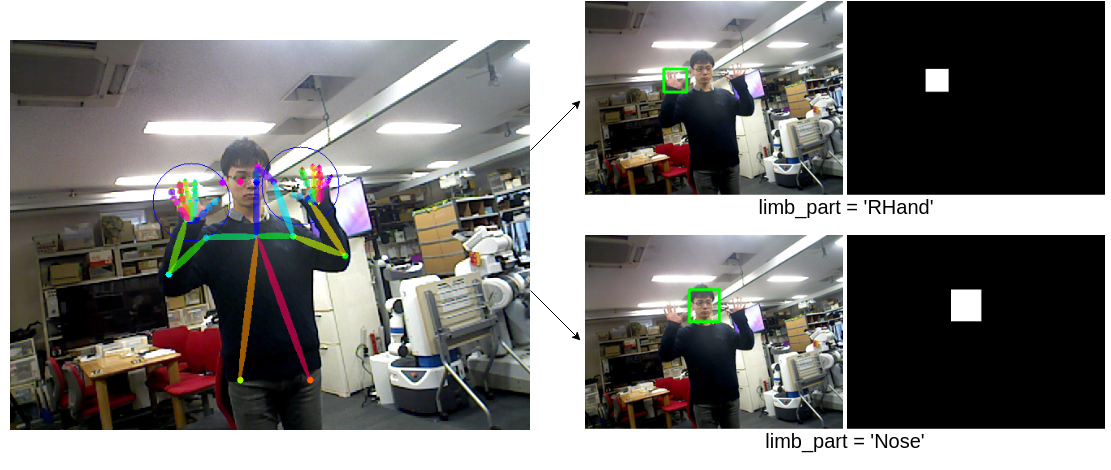
Create people mask image according to people pose information.
Subscribing Topic¶
~input(sensor_msgs/Image)Input image.
~input/pose(jsk_recognition_msgs/PeoplePoseArray)Input people pose array.
Publishing Topic¶
~output(sensor_msgs/Image)People mask image.
~debug/output(sensor_msgs/Image)Debug image which has visualized rectangle of the masked limb part.
Parameters¶
~person_indices(Int, Default:-1)Which person to create mask of.
-1represents creating masks of all people.~limb_part(String or List of String, Default:all)Which limb part to create mask of.
RHand,LHand,Noseandallis allowed.~arms_score_threshold(Float, Default:0.25)Threshold of arm score.
Used when
limb_partincludesRHandorLHand.~hand_ratio(Float, Default:0.33)Ratio that is used to predict hand position from elbow and wrist positions.
Used when
limb_partincludesRHandorLHand.~hand_width_ratio(Float, Default:0.8)Ratio that is used to predict hand region from arm length.
Used when
limb_partincludesRHandorLHand.~face_ratio(Float, Default:0.6)Ratio that is used to predict face position from nose and neck positions.
Used when
limb_partincludesNose.~face_shoulder_ratio(Float, Default:0.5)Ratio that is used to predict face position from shoulder positions.
Used when
limb_partincludesNose.face_width_margin_ratio(Float, Default:1.3)Ratio that is used to decide face width margin.
Used when
limb_partincludesNose.~approximate_sync(Bool, Default:False)Use approximate synchronization policy.
~queue_size(Int, Default:10)Queue size for synchronization.
~slop(Float, Default:0.1)Slop for approximate sync.
Example¶
roslaunch jsk_perception sample_people_pose_estimation_2d.launch GPU:=0 LIMB_PART:='RHand'
roslaunch jsk_perception sample_people_pose_estimation_2d.launch GPU:=0 LIMB_PART:='Nose'