depth_image_filter.py¶
What is this?¶
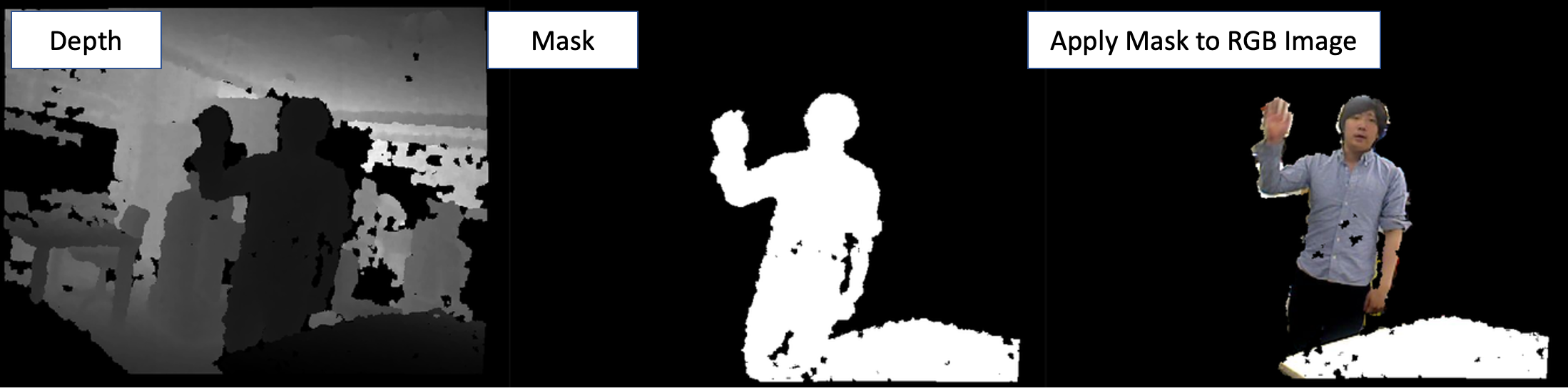
Create a mask image from the distance of a depth image.
Subscribing Topic¶
~input(sensor_msgs/Image)Input depth image.
Publishing Topic¶
~output/mask(sensor_msgs/Image)Mask image.
Parameters¶
~threshold(Float, Default:0.0)Mask threshold. Normally, pixels with a depth value farther than this value will be masked.
~negative(Bool, Default:False)Extact mask or the negative.
Example¶
roslaunch jsk_perception sample_depth_image_filter.launch