pose_array_to_pose.py¶
What is this?¶
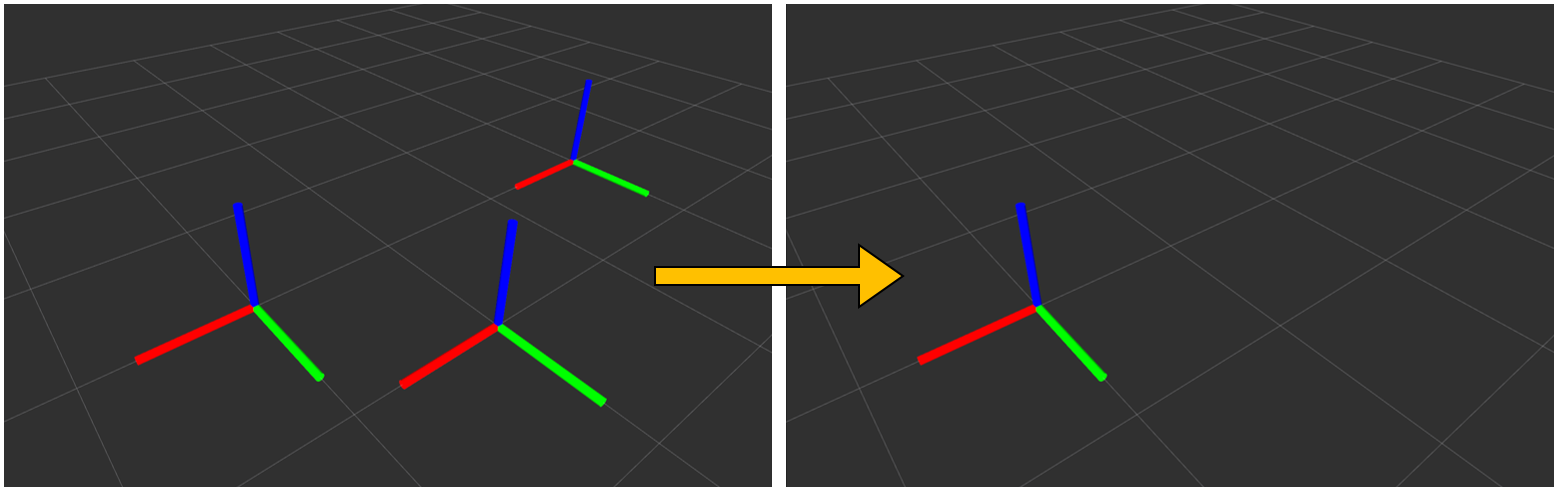
Convert geometry_msgs/PoseArray to geometry_msgs/PoseStamped.
Subscribing Topic¶
~input(geometry_msgs/PoseArray)Input pose array.
Publishing Topic¶
~output(geometry_msgs/PoseStamped)
Parameters¶
~index(Int, default:-1)Index value where pose is extracted from pose array. Please note that negative index is skipped.
Sample¶
roslaunch jsk_recognition_utils sample_pose_array_to_pose.launch