LogPolar¶
What is this?¶
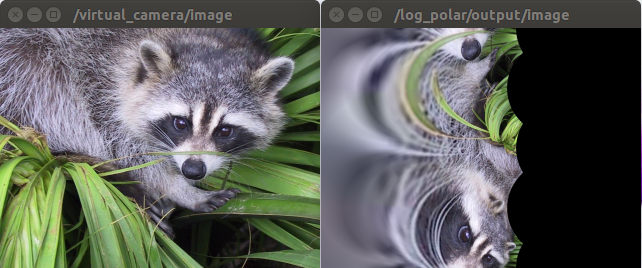
Map input image to log polar space.
This function is an imitation of central vision of human.
Subscribing Topic¶
~input/image(sensor_msgs/Image)Input image.
~input/camera_info(sensor_msgs/CameraInfo)Input camera info.
Note
The subscribing topic name is changed when you remap the one of input image, because it uses image_transport.
Publishing Topic¶
~output/image(sensor_msgs/Image)Log polar space image.
~output/camera_info(sensor_msgs/CameraInfo)Output camera info.
Parameters¶
~inverse_log_polar(Bool, default:false)Whether to apply inverse mapping.
~log_polar_scale(Float, default:100.0)Scaling coefficient. This parameter can be changed by
dynamic_reconfigure.~resize_scale_x,~resize_scale_y(Float, default:1.0)Resizing scale. This paramater can be changed by
dynamic_reconfigure.~msg_par_second(Float, default:15.0)Topic publishing rate [Hz]. This parameter can be changed by
dynamic_reconfigure.~verbose(Bool, default:false)This parameter is not used.
Sample¶
$ roslaunch resized_image_transport sample_log_polar.launch