ImageSift¶
Extract sift features from input image.
Subscribing Topic¶
image(sensor_msgs/Image)Input image. This triggers output
Feature0D.camera_info(sensor_msgs/CameraInfo)Input camera_info.
Publishing Topic¶
Feature0D(posedetection_msgs/Feature0D)This appears with input
image.ImageFeature0D(posedetection_msgs/ImageFeature0D)This appears with both inputs
imageandcamera_info.
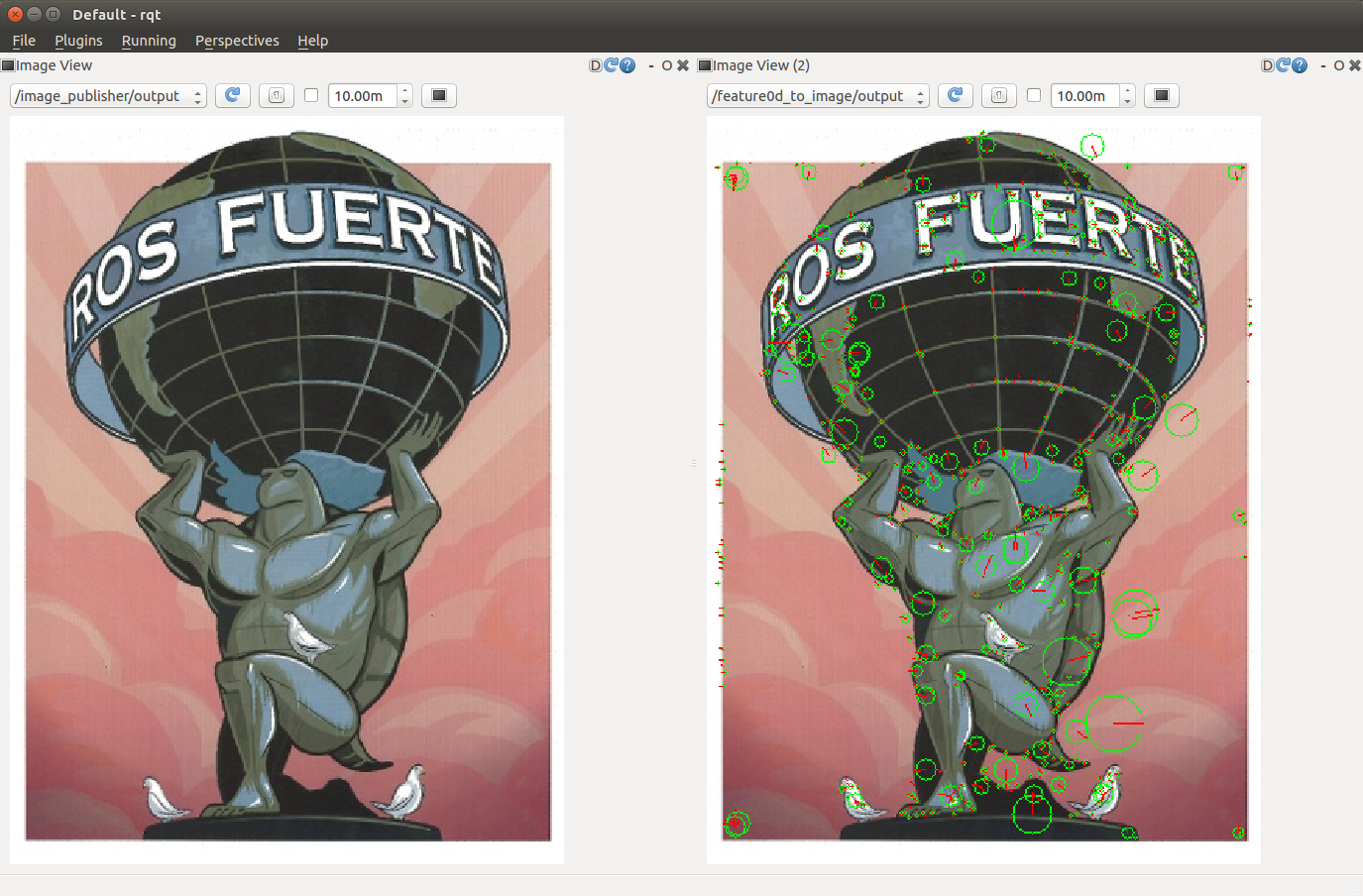
Sample¶
$ roslaunch imagesift imagesift_sample.launch