rect_array_to_cluster_point_indices.py¶
What is this?¶
Convert jsk_recognition_msgs/RectArray to jsk_recognition_msgs/ClusterPointIndices
Subscribing Topic¶
~input(jsk_recognition_msgs/RectArray)Input rect array.
~input/info(sensor_msgs/CameraInfo)Input camera info. Subscribe only when
use_infoistrue.
Publishing Topic¶
~output(jsk_recognition_msgs/ClusterPointIndices)Output cluster point indices.
Parameters¶
~use_info(Bool, Default:false)Subscribe camera_info topic or not
~img_width: (Int, required)Image width. Required only when
use_infoisfalse.~img_height: (Int, required)Image height. Required only when
use_infoisfalse.~queue_size(Int, Default:10)Queue size for
message_filters. Used only whenuse_infoistrue.~approximate_sync(Bool, Default:false)Use approximate_sync or not. Used only when
use_infoistrue.~slop(Float, Default:0.1)Slop size for
message_filters. Used only whenuse_infoistrue.
Sample¶
roslaunch jsk_recognition_utils sample_rect_array_to_cluster_point_indices.launch
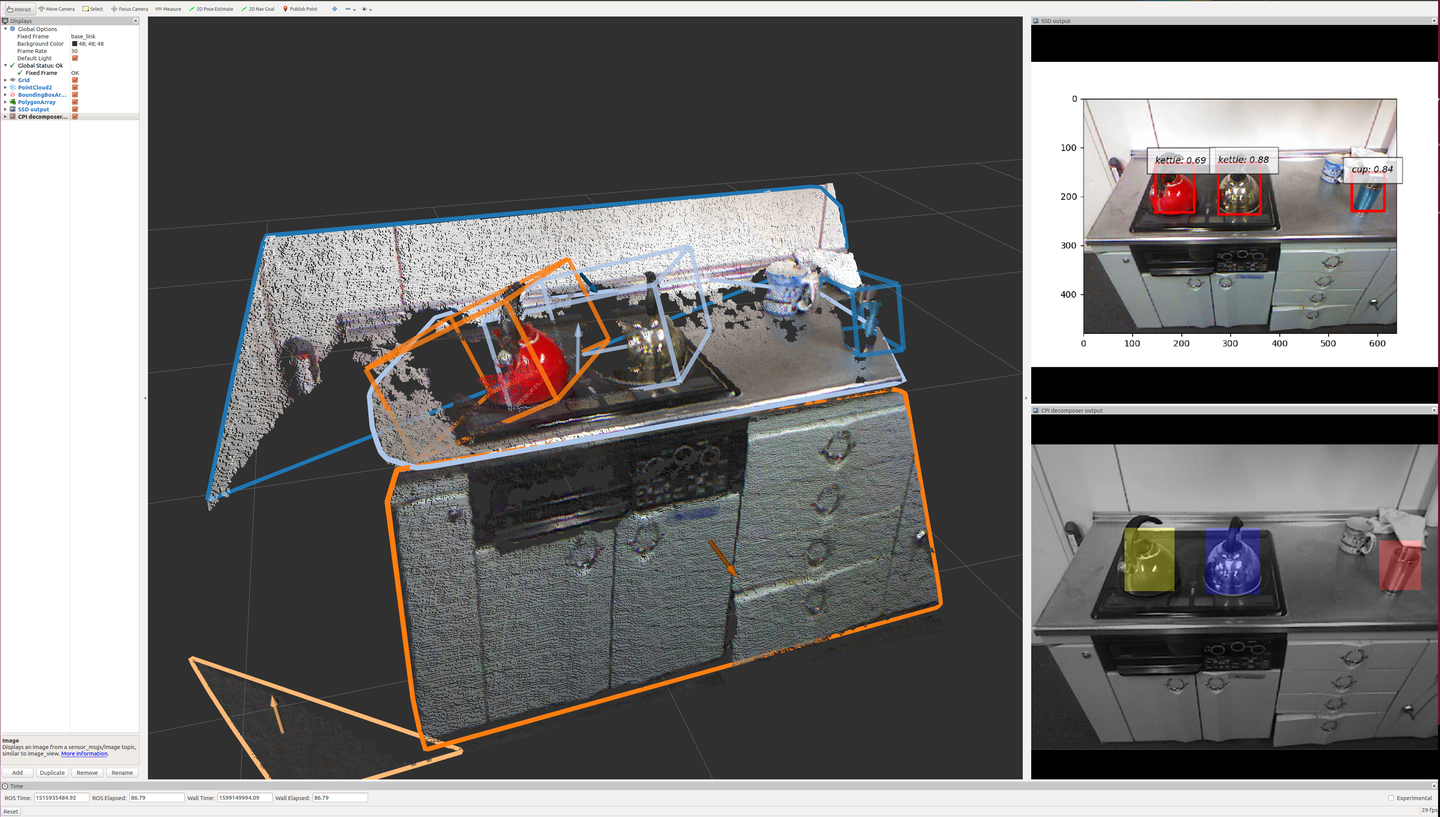
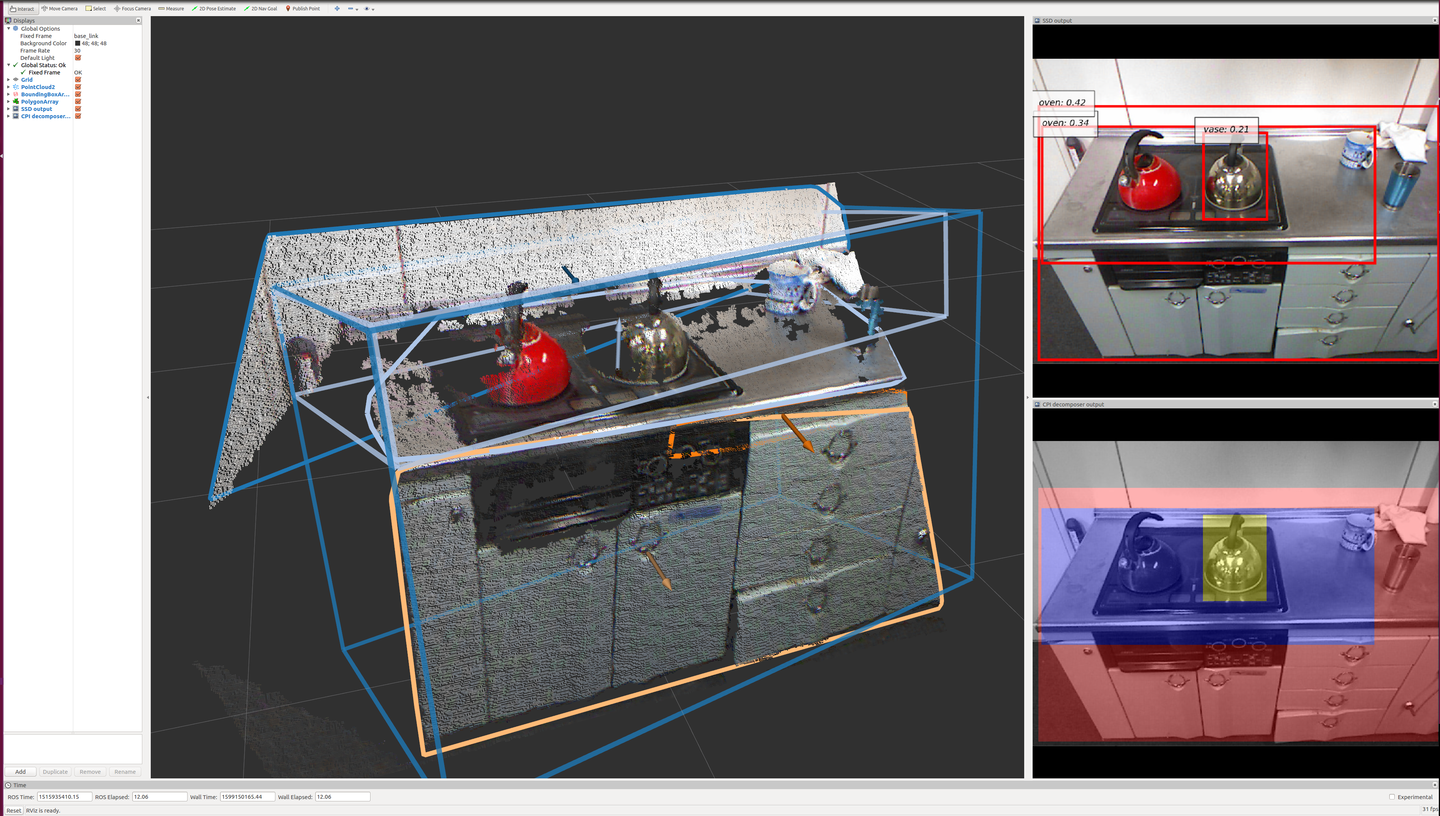
Sample with SSD object detector¶
SSD object detector with GPU or CPU¶
# CPU
roslaunch jsk_recognition_utils sample_ssd_to_bounding_box_73b2_kitchen.launch gpu:=-1
# GPU
roslaunch jsk_recognition_utils sample_ssd_to_bounding_box_73b2_kitchen.launch gpu:=0
SSD object detector with TPU¶
roslaunch jsk_recognition_utils sample_ssd_to_bounding_box.launch gpu:=-1
# coral ssd launch
source ~/coral_ws/devel/setup.bash
roslaunch jsk_recognition_utils sample_ssd_coral.launch