polygon_array_publisher.py¶
What is this?¶
Get polygons as rosparam and publish them as jsk_recognition_msgs/PolygonArray.
Publishing Topic¶
~output(jsk_recognition_msgs/PolygonArray)Output polygons.
~output/coefficients(jsk_recognition_msgs/ModelCoefficientsArray)Output coefficients. This topic will be published if
~publish_coeffsisTrueand each polygon is in planar.
Parameters¶
~polygons(List, required)List of polygon.
Each polygon must have
pointsfield, which is a list of vertices.You can also fill
labelandlikelihoodfield for each polygon.~frame_id(String, required)Frame ID of polygons.
~publish_rate(Float, default:1.0)Publish rate [Hz].
~publish_coeffs(Bool, default:False)If this value is true and each polygon is in planar, publish
jsk_recognition_msgs/ModelCoefficientsArray.
Example parameters are below.
<rosparam>
frame_id: base_link
publish_coeffs: true
polygons:
- points:
- [1.0, -1.0, 0.0]
- [2.0, -1.0, 0.0]
- [2.0, 1.0, 0.0]
- [1.0, 1.0, 0.0]
label: 1
likelihood: 0.8
- points:
- [1.0, -1.0, 0.5]
- [2.0, -1.0, 0.5]
- [2.0, 1.0, 0.5]
- [1.0, 1.0, 0.5]
label: 2
likelihood: 0.6
</rosparam>
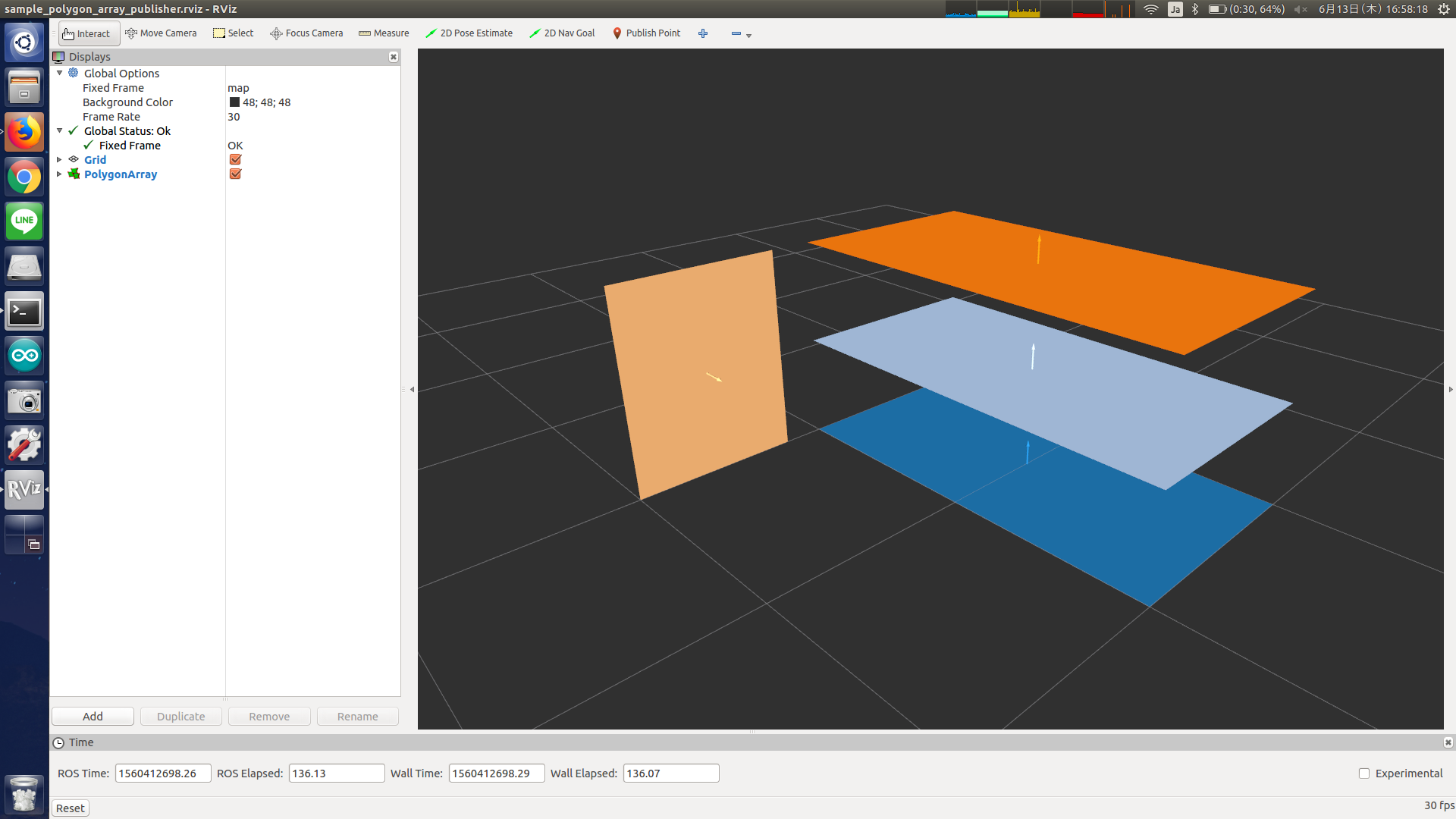
Sample¶
roslaunch jsk_recognition_utils sample_polygon_array_publisher.launch