EuclideanClustering¶
What Is This¶
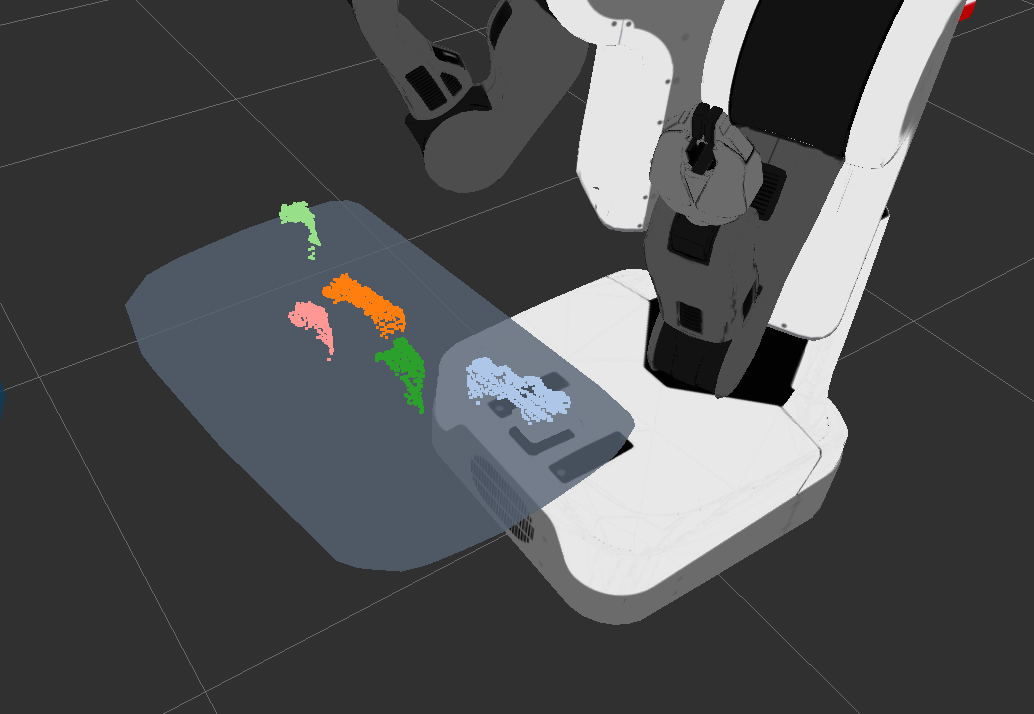
Segment pointcloud based euclidean metrics, which is based on pcl::EuclideanClusterExtraction.
This nodelet has topic interface and service interface.
The result of clustering is published as jsk_recognition_msgs/ClusterPointIndices.
If the number of the cluster is not changed across different frames, EuclideanClustering
tries to track the segment.
Subscribing Topics¶
~input(sensor_msgs/PointCloud2):input pointcloud. If
~multiisfalse, this input is only enough.~input/cluster_indices(jsk_recognition_msgs/ClusterPointIndices):input indices. If
~multiistrue, synchronized~inputand~input/cluster_indicesare used.
Publishing Topics¶
~output(jsk_recognition_msgs/ClusterPointIndices):Result of clustering.
~cluster_num(jsk_recognition_msgs/Int32Stamped):The number of clusters.
Advertising Services¶
~euclidean_clustering(jsk_pcl_ros/EuclideanSegment):Service interface to segment clusters.
sensor_msgs/PointCloud2 input
float32 tolerance
---
sensor_msgs/PointCloud2[] output
Parameters¶
~tolerance(Double, default:0.02):Max distance for the points to be regarded as same cluster.
~label_tracking_tolerance(Double, default:0.2)Max distance to track the cluster between different frames.
~max_size(Integer, default:25000)The maximum number of the points of one cluster.
~min_size(Integer, default:20)The minimum number of the points of one cluster.
~multi(Boolean, default:false)Flag of applying euclidean clustering for each pointcloud’s indices(
~input/cluster_indices’s cluster_indices).If
~multiistrue, synchronized~inputand~input/cluster_indicesare used.~approximate_sync(Boolean, default:False):Policy of synchronization, if
falseit synchronizes exactly, else approximately. This value is only valid in case of~multiistrue.~queue_size(Int, default:20):Queue size of topic msgs for synchronization.
~downsample_enable(Boolean, default:false)Flag of VoxelGrid downsampling. If
~downsample_enableistrue,~inputis downsampled.~leaf_size(Double, default:0.01)Leaf size of voxel grid downsampling. This value is only valid in case of
~downsample_enableistrue.~cluster_filter(Int, default:0)Specify cluster filtering methods.
0: Passthrough the all clustering result for each cluster.
1: Take a cluster which has the maximum size of those for each cluster. The length of
~output’s cluster_indices,~cluster_num, is length of~input/cluster_indices’s cluster_indices.
Sample¶
Plug the depth sensor which can be launched by openni.launch and run the below command.
roslaunch jsk_pcl_ros euclidean_segmentation.launch