checkerboard_detector¶
checkerboard_detector is an executable to detect checker board.
You can find marker pattern in jsk-ros-pkg/calibboard_sheet.
Subscribing Topics¶
image(sensor_msgs/Image)camera_info(sensor_msgs/CameraInfo)Input image and camera info. Intrinsic camera parameter is acquired from
camera_info.Image(sensor_msgs/Image)CameraInfo(sensor_msgs/CameraInfo)These topics are deprecated.
Publishing Topics¶
ObjectDetection(posedetection_msgs/ObjectDetection)objectdetection_pose(geometry_msgs/PoseStamped)Pose of checkerboard in
posedetection_msgs/ObjectDetectionandgeometry_msgs/PoseStamped.corner_point(geometry_msgs/PointStamped)Corner points.
polygons(jsk_recognition_msgs/PolygonArray)Publish checker board as
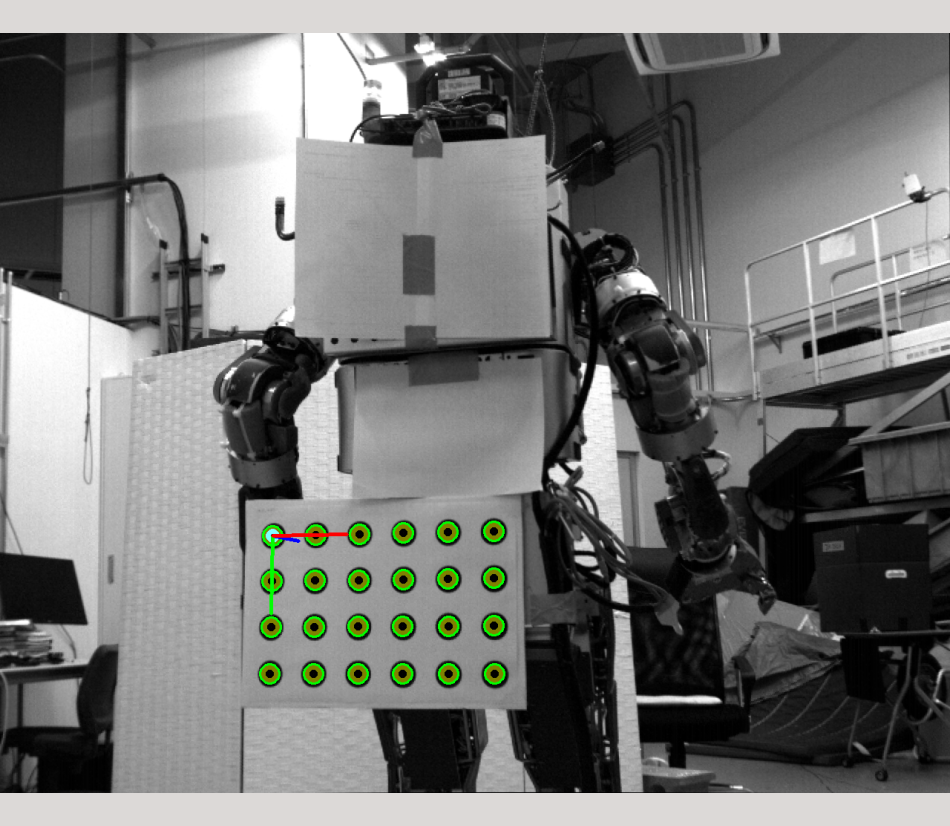
jsk_recognition_msgs/PolygonArray. It is useful to visualize in rviz.debug_image(sensor_msgs/Image)Debug image showing detected checker board.
Parameters¶
display(Int, default:0)Set
1to enable debug view (notimage_viewbut OpenCV window). Note thatdebug_imageis published even when this parameter is set to0.board_type(String, default:chess)Type of marker.
chess,circle,circles,acircleandacirclesare supported.circleandcirclesare the same, and alsoacircleandacirclesare.rect%d_size_x(Float, required)rect%d_size_y(Float, required)Size of checkerboard in meters, where
%dmeans index of checker board starting from0.grid%d_size_x(Int, required)grid%d_size_y(Int, required)The number of grids along x and y axis.
type%d(String, default:checker%dx%d)Name of checker board written to
objects/typefield inObjectDetectiontopic.maxboard(Int, default:-1)Maximum number of checker board.
-1means infinity, so this node wil detect as much as possible.use_P(Bool, default:false)By default, use camera matrix (K) and unrectified image (image_raw). If you use rectified image (image_rect),
use_Pshould betrue.invert_color(Bool, default:false)Invert white and black before searching cross points or circles.
message_throttle(Int, default:1)Finding checker boards every
message_throttleimagesframe_id(String, default:"")Frame ID written to
ObjectDetectiontopic header. If empty string is specified, frame_id ofimagetopic will be used.queue_size(Int, default:1)publish_queue_size(Int, default:1)Size of queue of subscriber is
queue_size, publisher ispublish_queue_size.axis_size(Float, default:0.05)circle_size(Int, default:6)For setting displayed marker size. Set
circle_sizein [pixel]. Setaxis_sizein [m].verbose(Int, default:1)Output information about input image, number of detected checker board and elapsed time as
ROS_INFOif this parameter is greater than0.
Sample¶
roslaunch checkerboard_detector sample_checkerboard_detector.launch
Trouble Shooting¶
Q. Estimated checker board pose is not correct
A. First check debug image and all the detected corner points correctly superimposed on camera view.
- If the detected corner points is not correct, you need to modify checker board grid size (
grid_sizeparameters). - If the detected corner points is correct, confirm checker board size (
rect_sizeparmaeters) and intrinsic camera paramter is calibrated well.
- If the detected corner points is not correct, you need to modify checker board grid size (
Q. How many number of grids better?
A. I strongly recomment to choose
oddxevenorevenxodd. Because if you chooseoddxoddorevenxeven, detector will have two potential poses.