ImageSift¶
Extract sift features from input image.
Subscribing Topic¶
/image(sensor_msgs/Image)Input image. This triggers output
Feature0D./camera_info(sensor_msgs/CameraInfo)Input camera_info.
Publishing Topic¶
/Feature0D(posedetection_msgs/Feature0D)This appears with input
image./ImageFeature0D(posedetection_msgs/ImageFeature0D)This appears with both inputs
imageandcamera_info.
Parameters¶
~image_transport(String, default:raw)Set compressed or theora to subscribe compressed images
Run¶
You can run executable like below:
$ rosrun imagesift imagesift
To subscribe compressed image, run executable like below:
$ rosrun imagesift imagesift _image_transport:=compressed
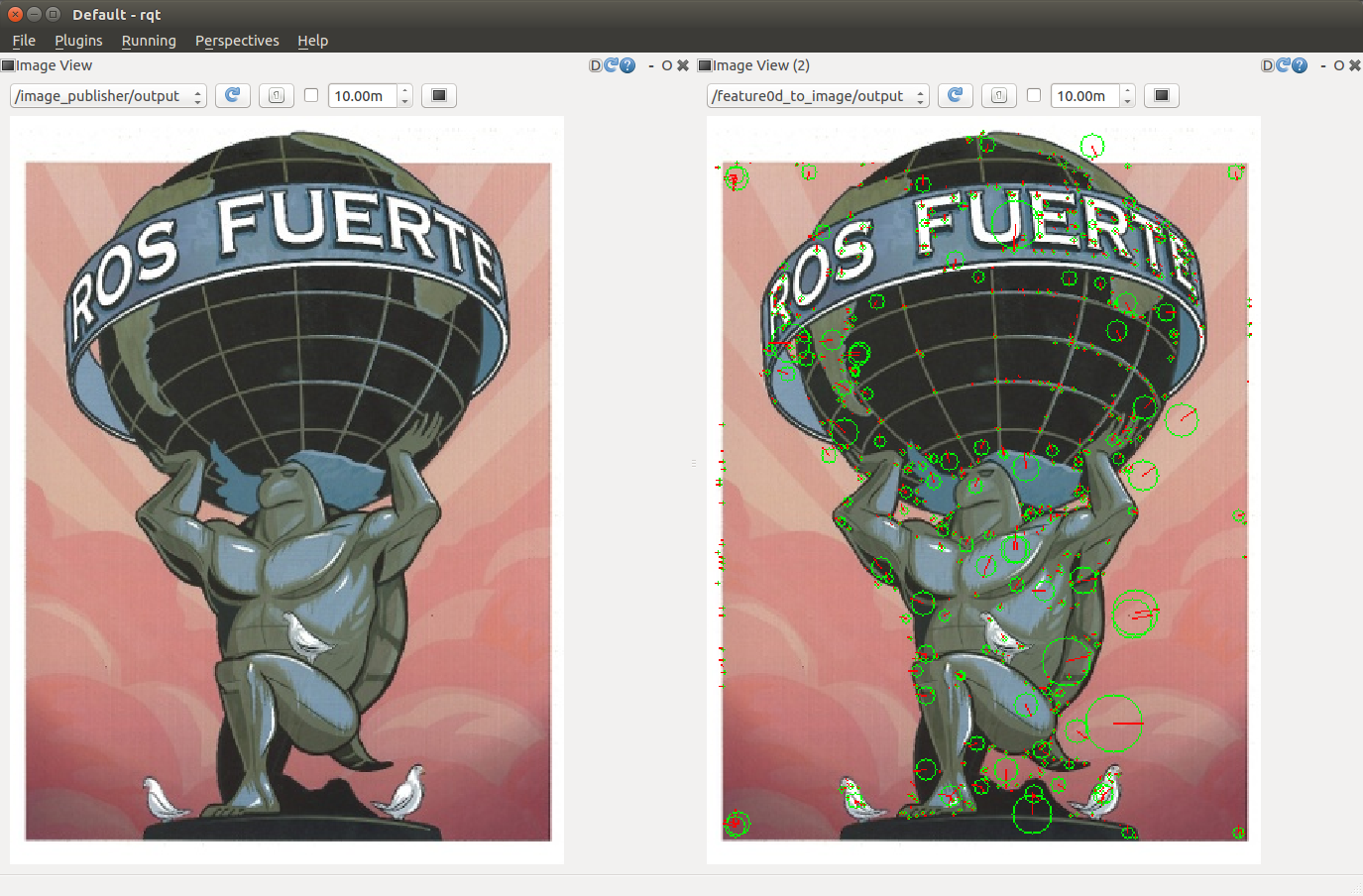
Sample¶
$ roslaunch imagesift imagesift_sample.launch